Installation angle compensation
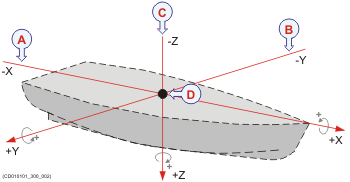
The vessel coordinate system follows the right-hand rule.If you take your right hand and align the thumb with the positive x-axis, then curl the fingers so that the index finger points
in the direction of the positive y-axis, your middle finger points in the positive z- axis.
The vessel coordinate system follows the right-hand rule. If you take your right hand and align the thumb with the positive x-axis, then curl the fingers so that the index finger points
in the direction of the positive y-axis, your middle finger points in the positive z- axis. Using the defined origo of the vessel you can now define the centre of the installed unit.
The orientation of an installed unit is specified by three rotation angles, called Eulers angles.
Each rotation is specified by an angle of rotation. The rotation angle is defined to be positive for a rotation that is clockwise when viewed by an observer looking along the
rotation axis from the origin of the coordinate system.
For example, the carts on a Ferris wheel move along a circle around the a horizontal axis through the centre of that circle. If a cart moves around the wheel once, the angle of rotation is 360°. If the cart was stuck halfway, at the top of the wheel, at that point its angle of rotation was only 180°.
| • |
|