6 Installing one or more transducers
The transducers you want to use with the EK80 system must be "installed" as a part of the software configuration. Which transducers to use depends on the number of transceivers in your system, and the licenses you have for these. Unless you replace a broken transducer, or add a new, you only need to do this once.
Prerequisites
It is assumed that the EK80 software has been installed, and that all relevant license strings have been applied. You need to know the type and serial number of each transducer that you wish to install.
Context
Each transducer is added using the Transducer Installation page. The Transducer Installation page is located in the Installation dialog box.
You can only choose a transducer from the Model list. The list is generated from a system file on your computer. It contains all the transducers that are compatible with the transceiver(s) you have. The list also includes technical specifications for each transducer. You can not see this information, but it is used by the EK80 system to set up the operational parameters. This allows each transceiver to optimise its performance for the individual transducer models.
If you cannot find your transducer in the list, contact you dealer, agent or Kongsberg Maritime to upgrade the relevant software component.
Note
Just making changes and selecting OK at the bottom of the page will not install anything. Select what to install, define the relevant parameters, and then select Add.
If your EK80 system shall only be used with an ADCP transceiver or transducer for current profiling, you do not need to install other
transducers.
Procedure
| 1 | Open the Setup menu. |
| 2 | On the Setup menu, select Installation. Observe that the Installation dialog box opens. This dialog box contains a number of pages selected from the menu on the left side.
|
| 3 | On the left side of the Installation dialog box, select Transducer Installation. |
| 4 | Select the transducer you wish to install from the Model list. Note
Make sure that you select a transducer that is supported by your current license.
|
| 5 | Insert the serial number. This serial number is very important, because you will need it as a reference identification when the EK80 system is calibrated. Transducers with built-in "intelligence" will automatically provide this serial number.
|
| 6 | Type the name you wish to use into the Custom Name box. Type any name that you wish to use to identify the transducer. The name you select will only be used to identify the transducer in other dialog boxes. It is not used in the echo data that you export. If you do not have a computer keyboard connected to your EK80 system, select the Keyboard button to open an on-screen keyboard.
|
| 7 | Select mounting method. |
| 8 | Specify the orientation of the transducer beam. |
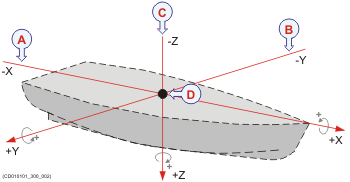
| 9 | If relevant for your transducer installation, provide the accurate physical location of the transducer with reference to the
vessel’s coordinate system. Note
These settings are intended for the installation of an ADCP transceiver or transducer for current profiling. The information is not used to adjust for installation misalignments, but will be included in the RAW files for post-processing
purposes.
Use the centre of the transducer face as reference, and define the offset values related to the Ship Origin.
|
| 10 | If relevant for your transducer installation, provide the rotation angles. Note
These settings are intended for the installation of an ADCP transceiver or transducer for current profiling. The information is not used to adjust for installation misalignments, but will be included in the RAW files for post-processing
purposes.
|
| 11 | Select Add to save the information you have provided. The transducer is added to the list in the Installed Transducers box.
|
| 12 | Repeat for each transducer that you want to install. |
| 13 | Continue your work in the Installation dialog box, or select OK to close it. |
Result
Once a transducer has been installed, it is listed in the Installed Transducers box. To see the information you have collected about the transducer, select the relevant transducer in the list.
The Edit functionality on the Transducer Installation page makes it possible to change the information you have provided for the transducer. You cannot change the model identification and the serial number. The custom name is used several places in the user interface, and it can be changed.
The Remove functionality on the Transducer Installation page makes it possible to delete the information you have provided for the transducer. There is no "undo" functionality.