About bottom echoes
A hard flat bottom reflects the transmitted signal as if it was a mirror. The transmitted pulse hits the illuminated bottom area at nearly the same instant, and the echo from different parts of this
area arrive back at the surface also at nearly the same instant. A different situation arises when the bottom is not flat any longer.
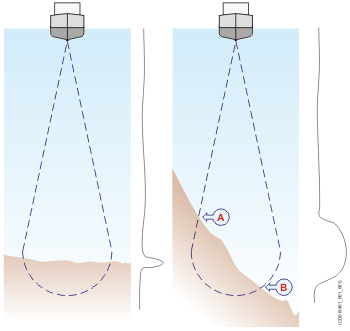
The received echo signal is basically an attenuated copy of the transmit pulse. The echo signal from a sloped bottom is characterized
by having a longer duration and a slower rise and fall time. The transmitted pulse first hits the slope at point (A), and as time elapses the reflection point travels along the slope towards point (B).
Many locations do not have a solid hard bottom. Frequently, the bottom is composed of layers of mud, clay and sand which can
be observed as coloured bands in the EK80 echograms.
The bottom detection algorithm is implemented solely in software, and separate algorithms are run for each frequency channel. The algorithm is designed with emphasis on reliability in the sense that erroneous depth detections are never shown. Whenever the quality of a detection is questionable the algorithm outputs a depth of 0.00 to indicate that no reliable detection was obtained.
The EK80 algorithm is designed to handle a number of difficult situations. The algorithm maintains bottom lock for a discontinuous jump in bottom depth. It avoids false bottom detections on for example a dense school of fish. The algorithm chooses the upper boundary of the first layer when the bottom consists of layers.
The bottom detection algorithm locks to the first good bottom return. The depth at point A rather than the depth along the transducer axis will be output for a sloped bottom. The detected depth value is always smaller than the depth along the transducer axis implying that a safety margin is automatically
included.