Velocidad de corriente
La velocidad de la corriente de agua se mide en cada uno de los haces del transductor ADCP. A través del procesamiento se calculan las velocidades relativas al barco (Velocidad del Barco) y a las coordenadas terrestres
(Geográfica). El efecto de la velocidad del barco se elimina de las velocidades medidas. El resultado es la velocidad de corriente de agua a través de toda la columna de agua de los haces.
La característica más importante de cualquier sensor ADCP es su habilidad para medir perfiles y velocidades de corriente.
El sensor divide el perfil de velocidad en celdas de profundidad uniformes (bins). Por medio del método de media deslizante
se crea un perfil de velocidad de corriente de la columna de agua. Un gran número de factores y procesos están involucrados
en este proceso.
La velocidad relativa entre el mar y el transductor se mide en cada uno de los cuatro haces. Cada haz solo puede medir la velocidad a lo largo del haz. Como un telescopio con un objetivo estrecho, este solo puede "ver" las cosas a lo largo de su línea de visión. Esto puede hacerse hacia el transductor ADCP o desde él, pero solo a lo largo del haz.
Esta velocidad se refiere a la velocidad del haz. La velocidad del haz se estima a través de la columna de agua en el haz
utilizando celdas de profundidad uniformes a lo largo del haz. Las transmisiones acústicas emitidas por el transductor producen ecos y estos se devuelven al receptor. Estos ecos están sujetos a un desplazamiento por efecto Doppler y proporcionan información sobre la velocidad de corriente. Para crear un perfil de velocidad de corriente, los ecos de todo el alcance del haz deben ser procesados por el receptor. Esto comporta un procesamiento continuo de los datos de eco. Los ecos de mayor alcance tardan más en retornar que los ecos de alcances más próximos.
Consejo
El tamaño de las celdas de profundidad puede ajustarse en el cuadro de diálogo Normal Operation (Operativa Normal).
| • | Utilice celdas de profundidad menores en aguas más someras. |
| • | Utilice celdas de profundidad mayores en aguas más profundas. |
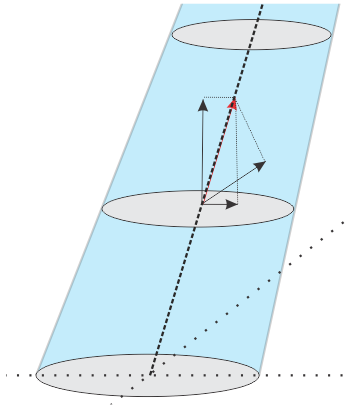
Ilustración:
La velocidad de corriente se presenta comúnmente como una flecha. La longitud de la flecha representa la magnitud de la velocidad, mientras que la punta de la flecha indica la dirección. La velocidad de corriente puede dividirse en componentes de tres dimensiones. La presentación del componente horizontal y vertical de la velocidad de corriente proporciona una visualización del desplazamiento
de la corriente en estas direcciones. Esto resulta útil para estimar la velocidad de corriente relativa en los puntos cardinales o relativa a la orientación del
barco, así como para estimar la velocidad de corriente hacia arriba y hacia abajo. Los datos GPS y MRU se utilizan para determinar la velocidad del transductor.
Las velocidades del haz a lo largo de los cuatro haces se combinan para encontrar los dos componentes de velocidad horizontales
y el vertical, además del error de velocidad. Conocer los ángulos de instalación del transductor hace posible transformar la velocidad estimada en coordenadas del barco. Los datos de MRU y GPS (balanceo, cabeceo y rumbo) se utilizan para transformar la velocidad en coordenadas globales. Dado que la velocidad medida por ADCP en este paso es la velocidad relativa entre el mar y el transductor, la velocidad del
transductor debe eliminarse para obtener la velocidad de corriente. La velocidad del transductor se elimina y el resultado es la velocidad de corriente en coordenadas globales.