Sistema de coordenadas del barco
El sistema de coordenadas del barco se establece para definir las ubicaciones físicas de los sistemas y sensores.
Cuando en el barco se encuentran diferentes sensores y transductores y se desea que todos ellos ofrezcan información precisa,
es necesario saber sus posiciones físicas relativas. La antena de un sensor de posición normalmente se monta por encima de la superestructura, mientras que un sensor de movimiento
se encuentra cerca del centro de gravedad del barco. Ambos se encuentran alejados del transductor de un sensor de profundidad,
que puede encontrarse cerca de la proa. Con bastante frecuencia, la información de un sensor depende de los datos de otro. Por tanto, es importante que las medidas
relevantes se compensen para estas distancias relativas.
Ejemplo
Si se desea medir al profundidad actual del agua, será necesario saber la distancia vertical desde el transductor de la ecosonda
hasta la línea de flotación. Puesto que el desplazamiento del barco cambia con la cantidad de carga, gasolina, etc., la ubicación
física de la línea de flotación en el casco deberá medirse de manera regular o con un segundo sensor.
Para establecer un sistema para medir la distancia relativa entre sensores, se establece un sistema de coordenadas virtual.
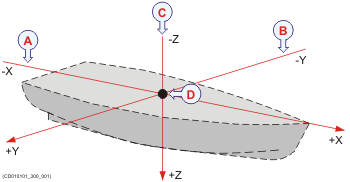
Este sistema de coordenadas tiene tres vectores: X, Y y Z.
| A | El eje X es la dirección longitudinal del barco, en paralelo con el muelle. Un valor positivo de X significa que un sensor o punto de referencia se encuentra delante del punto de referencia (origen). |
| B | El eje Y es la dirección transversal del barco, y en paralelo con el muelle. Un valor positivo de Y significa que un sensor o punto de referencia se encuentra a estribor del punto de referencia (origen). |
| C | El eje Z es vertical y paralelo al mástil. Un valor positivo de Z significa que un sensor o un nuevo punto de referencia se encuentra debajo del punto de referencia (origen). |
| D | Punto de referencia (Origen del barco) |
Origen del sistema de coordenadas
El origen es el punto de referencia donde se encuentran los tres ejes del sistema de coordenadas del barco. Todas las ubicaciones de los sensores del barco (antenas de radar y de sistemas de posicionamiento, transductores de ecosonda
y sonda, unidades de referencia del movimiento, etc.) están referenciadas al origen. En la mayoría de los caso, la ubicación del origen "oficial" del barco ya ha sido definido por el diseñador del barco o astillero.
El origen normalmente está identificado con una marca física y también aparece en los dibujos del barco.
Las ubicaciones usadas más frecuentemente son:
| • | A popa inmediatamente sobre el timón (marco 0) |
| • | Centro de gravedad del barco |
| • | La ubicación física de la Unidad de Referencia del Movimiento (MRU). |
Orígenes alternativos del sistema de coordenadas
De ser necesario, se puede definir la ubicación de otros orígenes para productos o propósitos específicos. Un ejemplo es el Punto de Referencia de la Navegación que frecuentemente se usa. Siempre que se realice un levantamiento para establecer información de desplazamiento, el topógrafo
también puede establecer una ubicación alternativa del origen. Siempre que sea relevante, cualquier ubicación alternativa se debe definir usando los valores de desplazamiento al origen
"oficial" establecido por el diseñador o astillero. Un origen alternativo comúnmente utilizado es la ubicación física de la unidad de referencia del movimiento (MRU).
Definir la ubicación física de cada sensor
Mediante el sistema de coordenadas del barco se puede definir la ubicación física de cada sensor utilizando tres valores numéricos
para X, Y y Z. Estos valores deben definir la distancia vertical y horizontal de un único punto de referencia: el origen. La ubicación física de la unidad de referencia del movimiento (MRU) suele ser el sensor más importante a definir. Para muchos sistemas, el rumbo también puede ser una medición crítica.
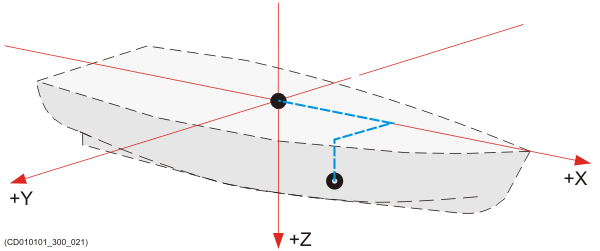
En este ejemplo se ha establecido un segundo punto de referencia. Está definido por tres valores de desplazamiento positivos
para X, Y y Z. Todos los valores son positivos porque el nuevo punto de referencia está delante y debajo del origen, y a estribor.
La precisión de los tres valores numéricos para X, Y y Z define la precisión de los datos del sensor. Si se requiere de más precisión, por ejemplo para el posicionamiento o cartografía submarinos, o para mediciones científicas,
se deberá ubicar cada sensor usando topógrafos profesionales. Para dicho uso, es fundamental realizar un estudio de la alineación. Los levantamientos normalmente los realizan expertos cualificados con equipos y métodos ya probados.