Menú Extras
El menú Extras no es un menú a pesar de su nombre y ubicación. Este "menú" abre una pequeña vista para monitorizar algunos parámetros operativos importantes.
Cómo
abrir

Seleccione el icono Extras. El icono se encuentra bajo el menú Principal. Seleccione el icono una vez más para cerrar el menú.
Descripción
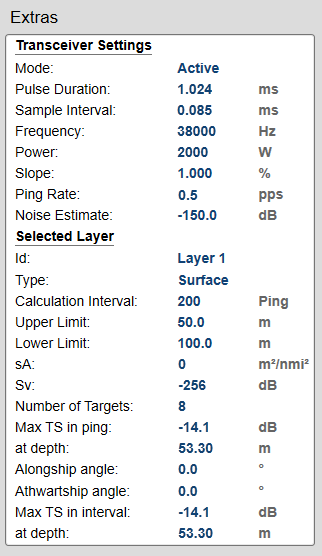
El "menú" Extras presenta una visión general de los principales parámetros operativos. La información se basa en el presente ecograma "activo".
Se añade información adicional sobre la capa actualmente "activa". En este contexto, la expresión layer (capa) se utiliza para describir las capas de profundidad que pueden ser definidas por los ecogramas del sistema EK80. Cada capa está definida por su límite de profundidad superior e inferior.
Nota
Algunos ajustes son específicos de la ecosonda y de la operativa ADCP.
Ajustes del transceptor
Modo
El modo operativo es controlado por Operation (Operativa) en el menú Operation (Operativa). Se puede configurar como Normal, Replay (Reproducir) o Inactive (Inactivo). Para activar Mission (Misión) se debe haber creado una configuración de misión previamente. Esta información se proporciona también en el panel de información Numerical (Numérico).
Duración de Pulso
El ajuste Pulse Duration (Duración de Pulso) especifica la duración actual ("longitud") del pulso transmitido. Puede seleccionar manualmente la duración del pulso que se ajuste a su operativa.
Este ajuste se controla en el cuadro de diálogo Operativa normal.
Esta información se proporciona también en el panel de información Numerical (Numérico).
Intervalo de muestreo
La información procedente de cada transductor del sistema EK80 es un flujo continuo de datos análogos. En procesamiento de señales, el muestreo es la reducción de esta señal continua a una señal discreta. Se convierte una onda de señal (que es una señal análoga continua en el tiempo) en una secuencia de muestras (que es una señal
discreta). La cadencia de muestro es el número promedio de muestras obtenidas en un segundo. El intervalo de muestreo es 1/cadencia de muestreo para permitir la lectura de tiempo (normalmente en milisegundos).
Esta información se proporciona también en el panel de información Numerical (Numérico).
Frecuencia
Este ajuste se controla en el cuadro de diálogo Operativa normal. Los parámetros Start Frequency (Frecuencia Inicial) y End Frequency (Frecuencia Final) se utilizan para configurar un barrido de frecuencia ("chirp"). Si los parámetros para la frecuencia inicial y la final no están disponibles, el transductor utilizado en el canal relevante
no soportará transmisiones de banda ancha. Para utilizar la función barrido de frecuencia ("chirp"), debe utilizar pulsos de frecuencia modulada. También debe utilizar un transductor que soporte el rango de frecuencias.
Potencia
El parámetro Power (Potencia) en el cuadro de diálogo Normal Operation (Operativa Normal) muestra la potencia de salida del transmisor en vatios. Puede cambiar manualmente la potencia de salida. La potencia de salida está limitada a la capacidad nominal máxima del transductor o a la capacidad máxima del transductor
o a la capacidad nominal máxima del transmisor, la que sea menor
Pendiente
El valor Pendiente identifica la rapidez con la que la potencia de salida en cada transmisión ("pulso") va del 0 al máximo. El valor (en %) indica la cantidad de duración del pulso que se usa durante este aumento. Por ejemplo, si el valor de la Pendiente es 50%, significa que la mitad de la duración del "pulso" se invierte en elevar la potencia al máximo.
Ratio de pulso
La expresión "ratio de pulso" se utiliza para describir el parámetro que controla cada cuánto puede o debe transmitir energía
acústica (un "pulso") en el agua el sistema EK80. Por lo general, los ajustes de alcance máximo limitan la cadencia de pulso. También hay que tener en cuenta cuestiones relativas al hardware. Por ejemplo, lo rápido que la unidad Unidad Procesadora maneja la información de cada pulso, lo rápido que el sistema se comunica con periféricos externos o lo que tarda el sistema
en guardar los datos.
El intervalo de cadencia de pulso (1/frecuencia de repetición de pulsos (PRF)) es la cadencia de pulso medida en el tiempo
entre cada transmisión.
Esta información se encuentra también en el cuadro de diálogo BITE (Equipo de Prueba Incorporado). El cuadro de diálogo BITE se abre desde el menú Configurar.
Ruido Estimado
Este valor refleja una estimación del nivel de ruido sobre el ancho de banda del transductor. El sistema EK80 mide los niveles de eco a lo largo del alcance elegido para cada transmisión ("pulso"). Normalmente, estas mediciones se realizan cada cinco metros, incluso en largos alcances.
Se graban todos los ecos y el ruido que hay en el agua. Esto incluye el ruido generado por el propio barco (eléctrico, hélices, maquinaria, etc.), el flujo del agua, la cavitación
y las interferencias. Los ecos de los peces y otras especies, así como del fondo, se detectan y añaden a las ecuaciones.
Al comparar estas mediciones, el sistema EK80 calcula el ruido estimado.
Consejo
Si establece el sistema EK80 en modo Pasivo, se eliminan de las ecuaciones todos los ecos de las transmisiones. Esto proporciona una mejor información acerca del ruido
actual. Si desea cambiar al modo Pasivo, utilice el cuadro de diálogo Operativa normal. El cuadro de diálogo Operativa normal se encuentra en el menú Operativa.
Esta información se proporciona también en la página Ruido en el cuadro de diálogo BITE (Equipo de Prueba Incorporado). El cuadro de diálogo BITE se abre desde el menú Configurar.
Tamaño Celda Profundidad
Este ajuste se controla en el cuadro de diálogo Operativa normal.
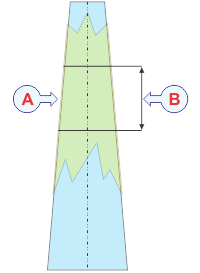
| A | Celda profundidad |
| B | Tamaño celda profundidad |
En medidas de corriente de agua, la expresión celda se utiliza para describir una celda de profundidad (a la que a veces se
le denomina bins). Estas son segmentos uniformes que utiliza el perfilador acústico de corriente Doppler (ADCP) para medir la velocidad de la
corriente.
El perfilador acústico de corriente por efecto Doppler (ADCP) mide la velocidad y la dirección de la corriente de agua por
medio de pulsos acústicos. Estos pulsos tienen una duración determinada por el tamaño actual de la celda de profundidad. Cada haz puede verse como un número de celdas de profundidad colocadas uniformemente desde la superficie del transductor hacia
abajo hasta el extremo inferior del haz acústico.
| • | Utilice celdas de profundidad menores en aguas más someras. |
| • | Utilice celdas de profundidad mayores en aguas más profundas. |
Una celda de profundidad pequeña ofrece mejor resolución de alcance. Esto facilita la detección de pequeñas variaciones de profundidad en la velocidad de corriente. En aguas más profundas, una celda de profundidad pequeña sufrirá más y más ruido gradualmente. El ratio de pulso también se reducirá debido a la gran cantidad de procesamiento que se requiere. Una celda de profundidad mayor tolera más ruido. Por esta razón, deben utilizarse celdas de profundidad mayores para medir la velocidad en aguas profundas.
Esta funcionalidad solo está disponible cuando ADCP está activado.
Máx(ima) Velocidad de Corriente
Este ajuste se controla en el cuadro de diálogo Operativa normal.
Maximum Current Speed (Velocidad máxima de la corriente) controla la duración del pulso y la función de procesamiento para operativas ADCP. No es necesario que realice cambios frecuentes en este ajuste. Seleccione un valor basado en las corrientes de agua esperadas en su área de levantamiento. Si no está seguro, elija un valor por encima de la corriente de agua esperada y redúzcalo según su experiencia. El valor que elija debe ser siempre igual o mayor que el valor esperado.
Nota
La precisión de medida se reduce si el valor es demasiado grande.
Esta funcionalidad solo está disponible cuando ADCP está activado.
Velocidad Máxima del Barco
Las operativas ADCP no pueden tener lugar sin entrada de datos desde una unidad de referencia de movimiento (MRU). La entrada de datos debe proporcionarse en el formato de datagrama KM Binary.
KM Binary es un formato de datagrama propio creado por Kongsberg Maritime para uso general. Este formato cuenta con una resolución muy alta en cuanto a los parámetros de cadencia y del sensor. Una unidad de referencia de movimiento compatible es la encargada de proporcionar el datagrama. Si el datagrama KM Binary se recibe con éxito, el valor mostrado es 0,0 nudos.
Capa seleccionada
Id (Identificación)
Este valor identifica la capa.
Tipo
Esto identifica el tipo de ecograma en uso.
Intervalo de cálculo
Los ajustes Intervalo de cálculo definen los parámetros que se utilizan para calcular la biomasa y la distribución del tamaño. Puede basar los cálculos en la distancia navegada, el tiempo transcurrido o una cantidad determinada de pulsos. Se muestra el parámetro actual.
Se puede acceder a los parámetros Intervalo de cálculo desde dos lugares de la interfaz de usuario del sistema EK80.
| • | La página se abre en el cuadro de diálogo Opciones Panel de Información. |
| • | El cuadro de diálogo se abre utilizando el botón Intervalo de cálculo del menú Configurar. |
Los parámetros son los mismos; no importa si utiliza la página o el cuadro de diálogo.
Límite Superior / Límite Inferior
Estos parámetros identifican el rango de profundidad cubierto por la capa.
sA
sA es el coeficiente de dispersión por área náutica. En este contexto el valor sA presenta el índice actual de biomasa. sA se abrevia normalmente como NASC.
Sv
Sv es la fuerza de retrodispersión por volumen. Sv se abrevia normalmente como VBS. El valor Sv identifica la retrodispersión del volumen total en la capa de profundidad.
Número de blancos
Esta información identifica el número de blancos individuales (peces aislados) en la capa de profundidad.
TS máx. en intervalo ... En profundidad
Estos parámetros identifican las fuerzas de blanco más fuertes detectadas y a qué profundidad se encuentran.
Ángulo proa a popa / Ángulo través
Estos parámetros identifican los ángulos offset longitudinal y transveral para el transductor. Estos ángulos offset se toman de los resultados de calibración.
Espectro de ruido
Esta información solo es válida para transmisiones FM. El valor refleja una estimación del nivel de ruido sobre el ancho de banda del transductor. Esta información es útil para identificar las fuentes de ruido tanto en el modo de transmisión Passive (Pasivo) como en el Active (Activo).