Página general
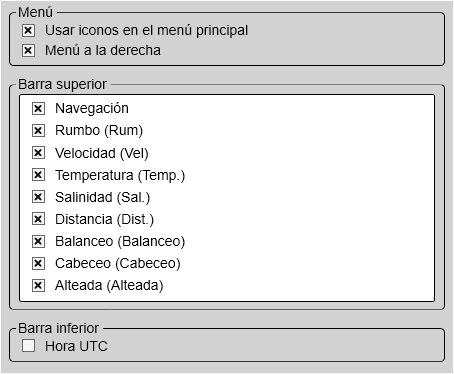
La página General en el cuadro de diálogo Opciones de presentación controla la ubicación del menú. Puede seleccionar la información de navegación que aparecerá en la barra superior. También puede elegir ver el Tiempo Universal Coordinado (Hora UTC) en la parte inferior de la presentación.
Cómo
abrir
Esta página se encuentra en el cuadro de diálogo Opciones de presentación. El cuadro de diálogo Opciones de presentación se encuentra en el menú Presentación.

Descripción
La página General ofrece varios "interruptores de encendido/apagado". Le permiten activar o desactivar las funciones relevantes.
Nota
La información mostrada en la barra superior no se debe utilizar para la navegación del barco.
Detalles
Menú a la Derecha
Seleccione esta opción para colocar el sistema de menú en la parte derecha de la presentación de la pantalla.
Barra Superior
La barra superior se encuentra en la parte superior de la presentación de la pantalla y se extiende desde el extremo izquierdo
al derecho. Con estas casillas puede seleccionar qué elementos mostrar en la parte superior de la presentación.
El texto entre paréntesis que aparece en cada opción es la identificación utilizada en la barra superior. El texto utilizado para identificar la opción de profundidad refleja la información que añadió como Nombre personalizado cuando instaló el transductor en la página Instalación del transductor en el cuadro de diálogo Instalación.
| • | Navigation (Navegación): Seleccione esta casilla para ver la posición geográfica actual del barco en la barra superior. La información de posición debe ser proporcionada por un sistema de navegación externo conectado al sistema EK80. |
| • | Heading (Rumbo): Seleccione esta casilla para ver el rumbo actual del barco en la barra superior. La información de rumbo debe ser proporcionada por un sistema de posicionamiento externo o por un sensor de rumbo o girocompás conectado al sistema EK80. |
| • | Speed (Velocidad): Seleccione esta casilla para ver la velocidad actual del barco en la barra superior. La información debe ser proporcionada por una corredera externa o un sistema de navegación conectado al sistema EK80. |
| • | Temperature (Temperatura): Seleccione esta casilla para ver la temperatura actual en la barra superior. La información debe ser proporcionado por un sensor de temperatura externo conectado al sistema EK80. |
| • | Salinity (Salinidad): Seleccione esta casilla para ver la salinidad del agua en la barra superior. La información sobre la salidad debe ser proporcionada por un sensor externo conectado al sistema EK80. |
| • | Distance (Distancia): Seleccione esta casilla para ver la distancia navegada por el barco en la barra superior. La información de distancia debe ser proporcionada por un sistema de navegación externo conectado al sistema EK80. |
| • | Roll (Balanceo): Seleccione esta casilla para ver los movimientos de balanceo actuales del barco en la barra superior. La información debe ser proporcionada por un sensor de movimiento externo (unidad de referencia de movimiento) conectado al sistema EK80. |
| • | Pitch (Cabeceo): Seleccione esta casilla para ver los movimientos de cabeceo actuales del barco en la barra superior. La información debe ser proporcionada por un sensor de movimiento externo (unidad de referencia de movimiento) conectado al sistema EK80. |
| • | Heave (Alteada): Seleccione esta casilla para ver los movimientos de alteada actuales del barco en la barra superior. La información debe ser proporcionada por un sensor de movimiento externo (unidad de referencia de movimiento) conectado al sistema EK80. |
| • | Depth (Profundidad): Seleccione esta casilla para ver la profundidad actual del agua en la barra superior. La información se obtiene del transductor elegido. El texto utilizado para identificar la opción de profundidad refleja la información que añadió como Nombre personalizado cuando instaló el transductor en la página Instalación del transductor en el cuadro de diálogo Instalación. |
Barra Inferior
Hora UTC: Marque la casilla para utilizar Tiempo Coordinado Universal (UTC). La hora se muestra en la barra inferior de la parte inferior de la presentación en pantalla. Cuando está desactivado, el sistema EK80 utiliza la hora local.
Nota
Para activar la hora UTC, su sistema EK80 debe configurarse para aceptar el datagrama NMEA ZDA. El datagrama NMEA ZDA contiene el código de tiempo universal (UTC), día, mes, año y zona horaria local.
Tiempo Universal Coordinado (Francés: Temps Universel Coordonnée, UTC) es el tiempo estándar primario por el que se regulan
los relojes y las horas en el mundo. Es uno de los numerosos sucesores estrechamente relacionados con la Hora Media de Greenwich
(GMT). Para la mayor parte de los fines, UTC se utiliza de manera intercambiable con GMT, pero GMT ya no está definido con
precisión por la comunidad científica. [...]
The current version of UTC is defined by International Telecommunications Union Recommendation (ITU-R TF.460-6), Standard-frequency
and time-signal emissions and is based on International Atomic Time (TAI) with leap seconds added at irregular intervals to
compensate for the slowing of Earth's rotation. Leap seconds keep UTC within 0.9 seconds of universal time, UT1.
Wikipedia, copiado en junio de 2014
Volver a...