해류 유속
해류 속도는 ADCP 트랜스듀서의 각 빔에서 측정됩니다. 선박(선박 속도) 및 지구 좌표(지리적)에 상대적인 속도를 처리하여 계산합니다. 선박 속도의 효과는 측정된 속도에서 제거합니다. 그 결과, 빔의 수주 전체에 대한 해류 속도 추정치가 도출됩니다.
ADCP 센서의 가장 중요한 특징은 전류 프로파일과 전류 속도를 측정할 수 있다는 것입니다. 센서는 속도 프로파일을 일정한 깊이 셀(빈)로 나눕니다. 슬라이딩 평균 방법을 사용하여 수주의 해류 유속 프로파일을 생성합니다.
이 측정에는 여러 가지 요인과 프로세스가 관련되어 있습니다.
바다와 트랜스듀서 사이의 상대 속도는 4개의 빔 각각에서 측정됩니다. 각 빔은 빔을 따라서만 속도를 측정할 수 있습니다. 좁은 초점의 망원경처럼, 단순히 시야에 있는 것들만 "볼" 수 있습니다. 이것은 ADCP 트랜스듀서를 향하는 방향일 수도, ADCP 트랜스듀서에서 멀어지는 방향일 수 있지만 빔을 따라서만 가능합니다.
이 속도를 빔 속도라고 합니다. 빔 속도는 빔을 따라 균일한 수심 셀을 사용하여 빔의 수주를 통해 계산됩니다. 트랜스듀서에서 방출되는 음향 전송은 에코를 생성하며, 이는 수신기로 전달됩니다. 이러한 에코는 도플러 이동을 겪고 해류 속도에 대한 정보를 제공합니다. 빔의 전체 범위에서 해류 속도 프로파일 에코를 생성하려면 수신기가 이를 처리해야 합니다. 에코 데이터의 지속적인 처리가 수반됩니다. 더 큰 범위의 에코가 더 가까운 범위의 에코보다 반환에 더 오래 걸립니다.
팁
깊이 셀의 크기는 Normal Operation(정상 작동) 대화 상자에서 조정할 수 있습니다.
| • | 얕은 물에서 작은 수심 셀을 사용합니다. |
| • | 깊은 물에서는 큰 수심 셀을 사용합니다. |
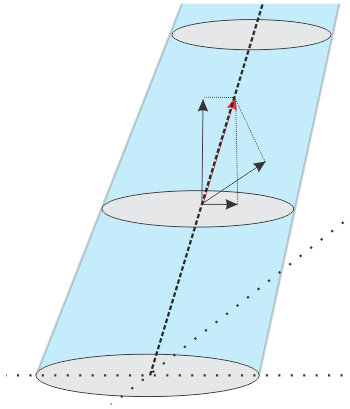
그림:
해류 유속은 일반적으로 화살표로 표시됩니다. 화살표 길이는 속도의 크기를 나타내고 화살표 끝은 방향을 나타냅니다. 해류 유속은 3차원 요소로 분류할 수 있습니다. 해류 유속의 수평 및 수직 요소를 표시하면 이러한 방향으로 전류의 변위를 시각화할 수 있습니다. 기본 방향 또는 상대적 선박 방향을 기준으로 상대적 해류 유속을 추정하고, 위/아래 방향으로 해류 유속를 추정하는 데 이 기능이 유용합니다. GPS 및 MRU 데이터는 변환기의 속도를 찾는 데 사용됩니다.
4개의 빔을 따른 빔 속도를 결합해 오류 속도 외에 2개의 수평 및 수직 속도 요소를 찾습니다. 트랜스듀서의 설치 각도를 알고 있으면 예상 속도를 선박 좌표로 변환할 수 있습니다. MRU 및 GPS의 데이터(롤, 피치 및 방향)는 속도를 전역 좌표로 변환하는 데 사용됩니다. 이 단계에서 측정된 ADCP 속도는 바다와 트랜스듀서 사이의 상대 속도이므로 해류 속도를 얻으려면 변환기의 속도를 제거해야 합니다. 변환기의 속도가 제거된 후 전역 좌표의 해류 속도가 출력됩니다.