ADCP 소개
ADCP를 사용한 해류 유속 측정은 도플러 효과의 원리를 기반으로 합니다. 도플러 효과(또는 도플러 이동)는 파형원을 기준으로 이동하는 관찰자에 대한 파형 주파수의 변화를 말합니다. 도플러 효과의 일반적인 예는 차량이 경적을 울린 후 관찰자로부터 멀어졌을 때 들리는 피치의 변화입니다. 주파수 변환은 관찰자를 향해 이동하는 음원이 각 음파를 관찰자에게 항상 조금 더 가깝게 전송하기 때문입니다. 따라서 각 파형은 관찰자에게 도달하는 데 약간 짧은 시간이 걸립니다. 송신기가 관찰자를 지나치면 각 음파가 관찰자에게 도달하기 위해 약간 더 오래 이동해야 합니다.
ADCP(Acoustic Doppler Current Profiler) 시스템은 현재 속력, 속도 및 방향을 측정합니다. 이 시스템은 고주파 음파(빔)를 전송하는 트랜시버를 사용합니다. 트랜시버가 리턴 신호의 도플러 주파수 이동을 판단합니다. 리턴 신호는 수주의 "드리프터"에서 산발됩니다. 드리프터는 euphasiids 및 copepods와 같은 플랑크톤 유기체 종입니다.
중요
드리프터는 해류와 같은 속도로 수동적으로 이동합니다. 해류 속도는 수주의 여러 수준에서 균질한 것으로 가정합니다. 반사되는 음향 주파수는 드리프터가 기기에 접근하는 속도에 비례하여 증가(또는 감소)합니다.
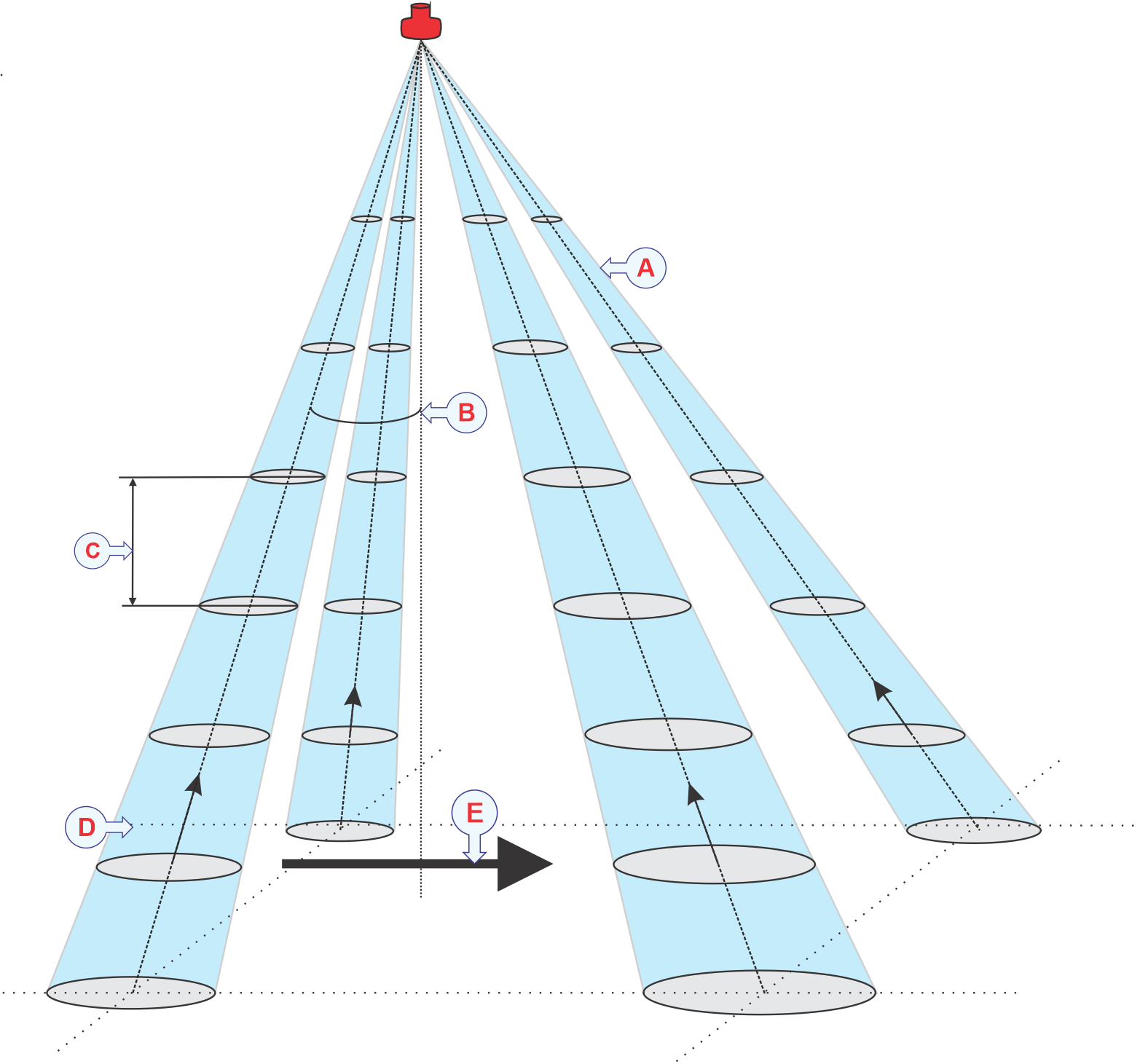
| A | ADCP용 배열 트랜스듀서는 4개의 빔을 사용합니다. |
| B | 각 빔의 중심선과 트랜스듀서의 수직선 사이의 각도는 약 30도입니다. |
| C | 하나의 수심 셀의 에코를 사용하여 각 깊이에서의 속도 추정치인 수심 셀을 확인할 수 있습니다. |
| D | 화살표는 빔의 3D 속도 요소를 표시합니다. 빔 방향으로 측정된 속도는 속도 요소를 추정하는 데 사용됩니다. |
| E | 해류 흐름 |
ADCP 시스템은 세 가지 주요 데이터 유형을 제공합니다.
| • | 해저 위로 이동할 때 선박 속도, 또는 해저면 추적이라고도 함. |
| • | 수주의 해류 속도 해류 속도는 수직 및 수평 방향으로 모두 측정됩니다. |
| • | 물고기와 어군의 물살을 가르는 움직임. |
ADCP 데이터는 항법, 해양학 및 어업 연구에 사용될 수 있습니다.
ADCP 트랜스듀서의 최대 범위는 신호 강도가 소음 수준과 비슷한 수준으로 떨어지는 위치에 해당합니다.이 범위를 벗어나면 ADCP는 도플러 효과를 정확하게 계산할 수 없습니다.