선박 좌표계
선박 좌표계는 시스템과 센서의 상대적인 물리적 위치를 정의하기 위해 설정됩니다.
선박에 여러 개의 서로 다른 센서 및 트랜스듀서가 있고 각각의 센서가 정확한 데이터를 제공하기를 원할 경우 각각의 물리적 상대 위치를 알아야 합니다. 위치 센서의 안테나는 일반적으로 상부 구조물 위에 높게 장착되는 반면, 동작 센서는 선박의 무게 중심 가까이 위치합니다. 이 두 센서 모두 보우와 가까운 곳에 있을 수 있는 수심 센서 위의 트랜스듀서와 물리적으로 멀리
떨어져 있습니다. 한 센서의 정보는 다른 센서의 데이터에 따라 결정되는 경우가 매우 많습니다. 그렇다면 관련 측정치를 이러한 상대 거리에 대해 보정하는 것이 중요합니다.
예
실제 수심을 측정하려면 에코 사운더 트랜스듀서에서 수선까지의 수직 거리를 알고 있어야 합니다. 선박의 배수량은 화물, 연료 등의 양에 따라 달라지므로 선체 상의 수선의 물리적 위치를 정기적으로 측정하거나 제2의 센서로
측정해야 합니다.
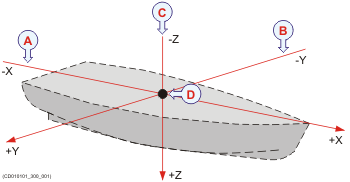
센서 사이의 상대 거리를 측정하는 시스템을 설정하기 위해 가상 좌표계가 설정됩니다. 이 좌표계는 X, Y, Z의 세 가지 벡터를 사용합니다.
| A | X축은 선박의 세로 방향이며 갑판과 평행합니다. X값이 양수라면 센서 또는 기준점이 기준점(원점) 앞에 있다는 의미입니다. |
| B | Y축은 선박의 가로 방향이며 갑판과 평행합니다. Y값이 양수라면 센서 또는 기준점이 기준점(원점)의 우현 쪽에 있음을 의미합니다. |
| C | Z축은 수직이며 마스트와 평행합니다. Z값이 양수라면 센서 또는 새 기준점이 기준점(원점) 아래에 있다는 의미입니다. |
| D | 기준점(선박 원점) |
좌표계 원점
원점은 선박 좌표계의 세 축 모두가 만나는 공통 기준점입니다. 선박 센서의 모든 물리적 위치(레이더 및 위치 지정 시스템 안테나, 에코 사운더 및 소나 트랜스듀서, 모션 레퍼런스 유닛 등)는 원점을 참조합니다. 대부분의 경우 선박의 "공식적인" 원점은 설계자나 조선소에서 정의합니다. 이 원점은 일반적으로 물리적 표시로 식별되며 선박 도면에도 표시됩니다.
자주 사용하는 위치는 다음과 같습니다.
| • | 방향타(프레임 0) 바로 위에 있는 Aft |
| • | 선박의 무게 중심 |
| • | 모션 레퍼런스 유닛(MRU)의 물리적 위치 |
좌표계 대체 원점
필요한 경우 특정 제품 또는 목적에 따라 다른 원점을 정의할 수 있습니다. 예를 들어 자주 사용되는 네비게이션 참조 지점이 있습니다. 정확한 오프셋 정보를 확인하기 위해 선박을 조사할 때마다, 측량사는 대체 원점을 정하기도 합니다. 이와 같은 대체 위치는 설계자 또는 조선소에서 설정한 "공식적인" 원점에 대한 오프셋 값을 사용하여 정의해야 합니다. 일반적으로 사용되는 대체 원점은 선박 모션 레퍼런스 유닛(MRU)의 물리적 위치입니다.
각 센서의 물리적 위치 정의
선박 좌표 시스템을 통해 X, Y, Z의 세 가지 숫자 값을 사용하여 모든 센서의 물리적 위치를 정의할 수 있습니다. 이 값으로 단일 기준점 즉 원점으로부터의 수직 및 수평 거리를 정의합니다. 물리적 위치를 정의할 가장 중요한 센서는 모션 레퍼런스 유닛(MRU)입니다. 많은 시스템의 경우 선박 선수 방향 또한 중요한 측정 요소입니다.
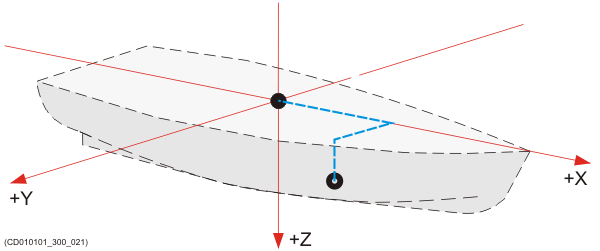
이 예에서는 두 번째 기준점이 설정되었습니다. X, Y 및 Z에 대한 세 개의 양수 오프셋 값으로 정의됩니다. 새 기준점이 원점 바로 앞과 아래, 우현에 있기 때문에 모든 값이 양수입니다.
X, Y, Z의 세 숫자 값의 정확도는 센서 데이터의 정확도를 정의합니다. 수중 위치 지정, 수중 매핑 또는 과학적 측정처럼 높은 정확도가 필요한 경우, 전문적인 육지 조사를 통해 각 센서를 배치해야 합니다. 이러한 목적으로 고품질의 결과를 얻기 위해서는 훌륭한 정렬 측정이 중요합니다. 측정은 일반적으로 검증된 조사 장비 및 방법을 사용하여 자격을 갖춘 숙련된 측량사가 수행합니다.