보정 마법사 대화 상자 #3 (데이터 처리)
보정 마법사의 세 번째 페이지에서는 보정 데이터를 보정 프로세스로 가져올 수 있습니다. 각 라인의 기록된 보정 데이터는 별도로 처리됩니다. 처리가 완료되면 결과를 저장하고 EK80에서 사용하는 보정 데이터를 업데이트할 수 있습니다.
필요조건
Calibration Wizard(보정 마법사) 대화 상자는 보정 프로세스 내에서만 열 수 있습니다. 보정 마법사를 시작하려면 EK80이 Normal(정상) 또는 Replay(재생) 모드여야 합니다.
오픈
Calibration Wizard(보정 마법사)를 열려면 EK80을 Normal(정상) 또는 Replay(재생) 모드로 설정하고 설정 메뉴에서 보정을 선택합니다.

첫 번째 Calibration Wizard(보정 마법사) 대화 상자에서 원시 데이터를 통한 새 보정(실시간 또는 재생)을 선택합니다. 그러면 2페이지가 열립니다. Calibration Wizard(보정 마법사) 대화 상자의 두 번째 페이지에서 보정할 채널을 선택하고 페이지 하단에서 다음을 선택합니다.
설명
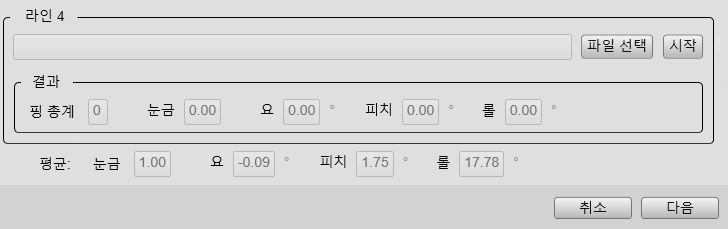
보정 마법사의 세 번째 페이지는 보정 프로세스의 각 라인마다 하나씩의 필드로 나뉩니다. 속도 측정 보정 프로세스에는 네 개의 라인이 있습니다. 각 라인에는 일련의 보정 데이터가 저장됩니다. 보정에 사용할 4개의 라인을 모두 선택하거나 라인의 하위 집합만 사용할 수 있습니다. 필드는 L1, L2, L3 및 L4로 표시됩니다.
처리하는 동안 대화 상자에 진행률 표시줄이 나타납니다.
세부사항
파일을 선택
파일 선택을 선택하여 운영자 시스템의 파일 관리자를 엽니다. 파일 관리자에서 속도 측정 보정을 위한 파일을 선택합니다.ADCP 실행에 있는 각 라인에 대한 파일을 선택하거나 파일 및 라인의 하위 집합을 선택할 수 있습니다.
시작
ADCP 실행의 특정 라인에 대한 보정 값 계산을 시작하려면 시작을 선택합니다. 처리하는 동안 대화 상자에 진행률 표시줄이 나타납니다. 처리가 완료되면 사라집니다.
핑 총계
핑의 수는 보정 프로세스 시작 이후 포함되는 핑 수를 표시합니다. ADCP 실행에서 특정 라인에 대한 보정 파일을 처리할 때 숫자가 누적됩니다.
눈금
눈금은 GPS 시스템의 SOG와 ADCP의 비율을 나타냅니다. 이상적인 이 값은 1에 가깝습니다.
요
선박의 수직 회전을 위한 조정 값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
피치
선박의 측면에서 측면으로 이동하는 축을 중심으로 수평 회전을 조정하는 값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
롤
보우에서 선박의 선미에 이르는 축 주위의 수평 회전 조정값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
평균눈금
눈금은 GPS 시스템의 SOG와 ADCP의 비율을 나타냅니다. 이상적인 이 값은 1에 가깝습니다.
요
선박의 수직 회전을 위한 조정 값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
피치
선박의 측면에서 측면으로 이동하는 축을 중심으로 수평 회전을 조정하는 값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
롤
보우에서 선박의 선미에 이르는 축 주위의 수평 회전 조정값입니다. 값은 보정에서 처리된 핑을 기준으로 합니다.
관련 작업