핑 페이지
Ping(핑) 페이지에서 미션 계획에 사용된 핑 정보를 보고 추가하고 편집할 수 있습니다. 미션 계획에 사용할 핑을 추가하거나 삭제할 수도 있습니다.
필요조건
EK80(수중 음파 탐지기 헤드)는 Normal(정상) 작동 모드에서 실행되어야 합니다.
오픈
이 대화 상자는 설정 메뉴에서 엽니다.

설명
Ping(핑) 페이지를 사용하여 미션 계획에 필요한 다양한 핑을 만들 수 있습니다.

| • | 생성된 핑 생성된 핑에는 생성한 모든 핑이 나열됩니다. 목록에서 핑을 선택하여 속성을 편집하거나 제거합니다. 새로 만들기를 선택하여 새 핑을 추가합니다.
|
| • | 핑 핑은 이름 및 파라미터를 사용하여 선택한 핑을 표시합니다. 핑을 삭제하거나 편집할 수 있습니다. 새 핑을 생성하려면 이름과 파라미터를 제공하십시오. 각 채널마다 하나의 행이 사용됩니다. 이 경우, 채널이라는 용어는 트랜시버, 트랜스듀서 및 작동 주파수의 조합을 식별하는 공통 용어로 사용됩니다.
|
세부사항
채널
이 열은 채널을 식별합니다. 이 경우, 채널이라는 용어는 트랜시버, 트랜스듀서 및 작동 주파수의 조합을 식별하는 공통 용어로 사용됩니다. 텍스트 문자열은 다음 정보를 제공합니다.
| • | 트랜스듀서 이름 |
| • | 트랜스듀서 일련 번호 |
멀티플렉싱 기능이 있는 트랜시버를 사용하는 경우 Normal Operation(정상 작동) 대화 상자에 각 멀티플렉싱 채널이 별도로 표시됩니다. 일부 파라미터는 멀티플렉싱된 각 채널에 대해 개별적으로 선택할 수 있으며, 다른 파라미터는 공통이어야 합니다.
ID
Mission Planner(임무 계획서) 대화 상자의 ID 파라미터는 이 채널의 채널 및 해당 채널의 핑에 대해 설정된 매개 변수를 식별합니다.
펄스 유형
Pulse Type(펄스 유형) 기능을 사용하면 전송된 펄스("핑")의 "모양"을 선택할 수 있습니다.
| • | CW |
| • | LFM |
약어 “CW”는 “Continuous Wave”(연속파)를 의미합니다. "LFM"은 “Linear Frequency Modulated”(선형 주파수 조절)을 의미합니다.
LFM Down에서 전송된 펄스는 범위의 상위 주파수를 사용하여 시작하고 더 낮은 주파수로 끝납니다. 진동수 스윕은 선형입니다. LFM Up에서 전송된 펄스는 범위의 낮은 주파수를 사용하여 시작하고 위쪽 주파수로 끝납니다.
노트
주파수 스위프("경보음") 기능을 사용하려면 주파수 조절 펄스를 사용해야 합니다. 주파수 범위를 지원하는 트랜스듀서도 사용해야 합니다.
광대역 트랜시버(WBT)만 LFM Down(LFM 다운)을 지원합니다. WBT에 최신 소프트웨어 버전이 설치되어 있어야 합니다.
각 트랜시버의 한 채널에서만 LFM Down 및 LFM Up을 사용할 수 있습니다. 두 개 이상의 채널에서 이 모드를 시도하려고 하면 오류 메시지가 나타납니다.
필터 유형
전용 수신 필터를 사용할 수 있습니다. 이 필터 설정은 LFM 펄스에만 사용할 수 있습니다.
| • | 표준 해상도: 이 필터 설정은 이전 EK80 소프트웨어 버전과 동일한 밴드 패스 필터 및 1/10 감소를 적용합니다. |
| • | 짧은: 이 필터 설정은 짧은 밴드패스 필터와 가능한 가장 낮은 간략화를 적용합니다. 이 설정을 사용하면 일반적으로 충동 반응이 짧고 출력 샘플 속도가 높아집니다. 이러한 결과 에코 데이터는 경계 근처 타겟을 검사하는 동안 필터의 범위 사이드로브 문제를 해결하는 데 사용할 수 있습니다. 필터는 주파수가 더 넓고 신호 대 잡음 비율이 낮아질 수 있습니다. |
노트
경계로 인해 짧은 해상도가 필요하지 않은 경우 표준 해상도를 사용하는 것이 좋습니다. 이 설정은 소음과 데이터 양을 모두 줄여줍니다. 설문 조사 중에 사용할 필터 유형 설정을 사용하여 EK80을 보정하는 것이 좋습니다.
수신 필터를 "실험"으로 간주하여 결과를 검토하도록 초대합니다.
ADCP 작업에는 이 기능을 사용할 수 없습니다.
모드
이 열은 현재 트랜시버 모드를 지정합니다. 현재 작업에 적합한 모드를 수동으로 선택할 수 있습니다.
사용할 수 있는 모드는 다음과 같습니다.
| • | 활성 송신기와 수신기는 모두 활성 상태입니다. 이것은 정상적인 작동 모드입니다.
|
| • | 수동 Passive(수동) 모드에서 EK80은 트랜스듀서에 의해 감지된 신호를 수신하고 계산합니다. 따라서 이 모드는 테스트 목적과 바다 주변 소음을 측정할 때 유용합니다. Passive(수동) 모드에서 EK80을 실행하여 타겟 에코(Active(활성) 모드에만 있음)와 소음(Active(활성) 모드와 Passive(수동) 모드 모두에 있음)을 구분하는 것도 도움이 될 수 있습니다.
|
| • | 테스트 수신기가 활성 상태일 때 송신기는 수동 상태입니다. 이 모드는 EK80에서 작동하도록 설계되지 않았습니다.
|
펄스 지속 시간
펄스 지속 시간 설정은 전송된 펄스의 현재 지속 시간("길이")을 지정합니다. 작업에 적합한 펄스 지속 시간을 수동으로 선택할 수 있습니다.
현재 깊이와 원하는 물고기 종류에 따라 펄스 지속 시간을 선택할 수 있습니다. 더 깊이 보고 싶다면 더 긴 펄스 지속 시간을 선택해야 합니다. 그러나 CW 전송을 사용할 경우 펄스 지속 시간이 길면 해상도가 감소합니다. 또한 EK80의 전송 빈도도 줄어듭니다. EK80에서 펄스 지속 시간과 대역폭은 상호 종속적입니다.
CW 전송에는 다음의 특징이 있습니다.
| • | 펄스가 더 길어서 탐지 범위도 더 깁니다. 펄스가 길면 EK80이 소음에 덜 민감하지만 낮은 범위의 해상도를 제공합니다. |
| • | 펄스가 짧으면 탐지 범위도 더 짧습니다. 펄스가 짧으면 EK80이 소음에 더 민감하지만 더 높은 범위의 해상도를 제공합니다. |
FM 전송의 경우:
| • | 펄스가 길면 탐지 범위도 더 깁니다. 범위 해상도는 펄스 지속 시간과 관계가 없습니다. |
| • | 펄스가 짧으면 탐지 범위도 더 짧아집니다. 그리고 EK80이 소음에 더 민감하게 반응합니다. |
이 파라미터의 현재 설정은 엑스트라 메뉴에도 표시됩니다.
ADCP 작업에는 이 기능을 사용할 수 없습니다.
전원
EK80의 출력 전원을 조정할 수 있습니다. 변환기 용량을 초과하여 출력을 높일 수는 없지만 얕은 물에서 더 나은 성능을 위해 혹은 반향으로 인해 문제가 있을 때 전력을 줄일 수 있습니다.
Normal Operation(정상 작동) 대화 상자의 전원 파라미터는 와트 단위로 측정된 송신기의 출력 전원을 표시합니다. 출력 전원은 수동으로 변경할 수 있습니다. 출력 전력은 트랜스듀서의 최대 등급이나 송신기의 최대 등급 중 가장 작은 값으로 제한됩니다. 사실상 출력을 줄일 수는 있지만 트랜스듀서 정격 출력 이상으로 늘릴 수는 없습니다.
이 파라미터의 현재 설정은 엑스트라 메뉴에도 표시됩니다.
시작/종료 주파수
시작 주파수 및 종료 주파수 파라미터는 주파수 스윕("charp")을 설정하는 데 사용됩니다. 시작 및 종료 주파수의 파라미터를 사용할 수 없는 경우 관련 채널에서 사용되는 트랜스듀서는 광대역 전송을 지원하지 않습니다. 주파수 스위프("경보음") 기능을 사용하려면 주파수 조절 펄스를 사용해야 합니다. 주파수 범위를 지원하는 트랜스듀서도 사용해야 합니다.
노트
사용하는 트랜스듀서가 선택한 주파수를 준수하는 것이 매우 중요합니다. 각 트랜스듀서의 주파수 범위는 트랜스듀서 설정 파일에 정의되어 있습니다. 지원되지 않는 주파수 범위를 선택하면 오류 메시지가 나타납니다.
이 파라미터의 현재 설정은 엑스트라 메뉴에도 표시됩니다.
ADCP 작업에는 이 기능을 사용할 수 없습니다.
램핑
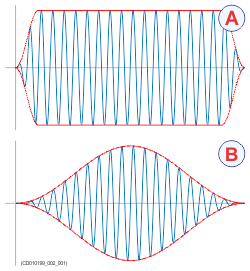
Normal Operation(정상 작동) 대화 상자에 제공된 Ramping(램핑) 매개 변수는 각 전송의 출력 수준(핑)이 0 V에서 최대 수준으로 증가하는 속도를 정의합니다. Fast(고속)과 Slow(저속)의 두 가지 옵션이 있습니다.
원리는 그림에 표시되어 있습니다. 곡선(A)의 Ramping (램핑)이 Fast (고속)으로 설정되어 있고, 레벨은 최소 2개에서 최대 10개 사이클까지 사용하여 0 V에서 최대 수준으로 증가합니다. 펄스가 끝날 때 최대 10회부터 최소 2회까지 출력 수준을 낮추기 위해 사용됩니다.
사용되는 주기 수는 연결된 트랜스듀서의 q-계수(중심 주파수에 상대적인 대역폭)에 따라 다릅니다. 램핑 주기 수는 펄스 길이의 절반에 해당하는 사이클 수로 제한됩니다.
곡선(B)의 Ramping (램핑)이 Slow (저속)으로 설정되어 있습니다. 처음 펄스 지속 시간의 절반을 사용하여 출력이 0 V에서 최대 수준으로 증가합니다. 그런 다음 펄스의 나머지 반을 사용하여 출력 수준을 낮춥니다.
이 파라미터의 현재 설정은 엑스트라 메뉴에도 표시됩니다.
ADCP 작업에는 이 기능을 사용할 수 없습니다.
순차적 핑
EK80에서 사용 중인 채널이 두 개 이상인 경우 순차적 핑 기능을 사용할 수 있습니다. 활성화되면 각 개별 트랜시버가 하나씩 순차적으로 송신("ping") 합니다. 활성화되지 않으면 모든 트랜시버가 동시에 "핑"됩니다. 순차적 핑은 미션과 관련이 없습니다.
트랜시버에 두 개의 트랜스듀서가 사용되는 경우, 이들 트랜스듀서도 동시에 "핑"됩니다.
팁
간섭이 문제가 되는 방식으로 트랜스듀서가 위치한 경우 순차적 핑 기능이 매우 유용할 수 있습니다.
이 파라미터의 현재 설정은 BITE(내장 테스트 장비) 대화 상자에도 표시됩니다. 설정 메뉴에서 BITE 대화 상자를 엽니다.
ADCP 작업에는 이 기능을 사용할 수 없습니다.
최대 유 속
최대 해류 속도는 ADCP 작동을 위한 펄스 지속 시간과 처리 기능을 제어합니다. 이 설정을 자주 변경할 필요는 없습니다. 조사 영역에서 예상 해류를 기준으로 값을 선택합니다. 확실하지 않은 경우 예상 해류보다 높은 값을 선택하고 경험에 따라 이를 줄이십시오. 선택한 값은 항상 예상 값보다 크거나 같아야 합니다.
노트
값을 너무 크게 설정하면 측정 정확도가 떨어집니다.
이 기능은 ADCP 작업에만 사용할 수 있습니다.
수심 셀 크기
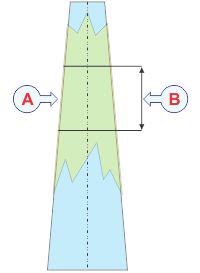
| A | 수심 셀 |
| B | 수심 셀 크기 |
해류 측정에서 셀이라는 단어는 수심 셀을 설명하는 데 사용됩니다(빈이라고도 함). 이 세그먼트는 해류 속도를 측정하는 데 사용되는 ADCP(Acoustic Doppler Current Profiler)에서 사용하는 균일한 세그먼트입니다.
음향 도플러 해류 프로파일러(ADCP)는 음향 펄스를 통해 수류의 속도와 방향을 측정합니다. 이러한 펄스는 깊이 셀의 현재 크기에 따라 기간이 결정됩니다. 각 빔은 트랜스듀서 표면에서 음향 빔의 아래쪽 끝까지 균일하게 배치된 여러 개의 깊이 셀로 볼 수 있습니다.
| • | 얕은 물에서 작은 수심 셀을 사용합니다. |
| • | 깊은 물에서는 큰 수심 셀을 사용합니다. |
작은 수심 셀은 범위 해상도가 더 뛰어납니다. 따라서 해류 유속의 작은 수심 변화를 쉽게 감지할 수 있습니다. 깊은 물에서는 작은 깊이의 셀은 점점 더 많은 소음의 영향을 받게 됩니다. 필요한 처리 양이 많아졌기 때문에 핑 속도도 감소합니다. 더 큰 수심 셀은 더 많은 소음을 견딜 수 있습니다. 따라서 깊은 물의 속도를 측정하려면 더 큰 수심 셀을 사용해야 합니다.
이 기능은 ADCP 작업에만 사용할 수 있습니다.
빔 유형
연결된 트랜스듀서의 빔 유형이 표시됩니다. 단일 빔 및 분할 빔 트랜스듀서를 사용할 수 있습니다.
돌아가기...