流速
在 ADCP 换能器的每个波束中测量水流速度。 通过数据处理,可以计算相对于船只(船只速度)和大地坐标(地理位置)的速度。 船只速度的影响将从测量的速度中去除。 结果得出整个波束水柱的水流速度估计值。
ADCP 传感器的最重要功能是测量水流剖面和流速的能力。传感器将流速剖面分成均匀的深度单元(二进制)。通过使用滑动平均法,可以创建水柱的流速剖面。这一测量涉及若干因素和过程。
海洋与换能器之间的相对速度在四个波束的每一个波束中进行测量。 每个波束只能测量沿该波束的速度。 就像窄焦点望远镜一样,它只能“看到”沿其视线的事物。 这可能面朝也可能背朝 ADCP 换能器,但只能是沿着波束。
此速度称为波束速度。波束速度使用波束中的水柱和沿波束均匀分布的深度单元来估算。 换能器发出的声波产生回波,这些回波被接收器接收。 这些回波会受到多普勒频移的影响,可提供有关流速的信息。 为了创建流速剖面,接收器必须处理来自整个波束范围的回波。 这涉及对回波数据的持续处理。 来自较大范围的回波比来自较近范围的回波需要更长的返回时间。
提示
深度单元的尺寸可以在 Normal Operation(正常操作)对话框中调整。
| • | 在浅水区中使用更小的深度单元。 |
| • | 在深水区中使用更大的深度单元。 |
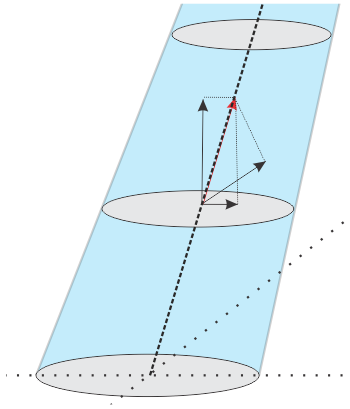
图示:
流速通常显示为一个箭头。 箭头的长度表示速度的大小,而箭头的尖端表示方向。 流速可以分解成三维分量。 显示流速的水平和垂直分量时,可以形象地显示这些方向上的水流位移。 这对于估计基本方向上或相对于船只方向的相对流速以及估计上/下方向中的流速非常有用。 GPS 和 MRU 数据用于查找换能器的速度。
除了速度误差之外,沿四个波束的波束速度被组合在一起,以找出两个水平和垂直速度分量。 了解换能器的安装角度可以将估计的速度转换为船只坐标。 来自 MRU 和 GPS 的数据(横向斜角、纵向角度和航向)用于将速度转换为全局坐标。 由于此阶段的 ADCP 测量速度是海洋与换能器之间的相对速度,因此必须减去换能器的速度才能得出流速。 减去换能器的速度后可得出全局坐标中的流速。