船只坐标系
建立船只坐标系是为了定义系统和传感器的相对物理位置。
当您的船只上有多个不同的传感器器和换能器,并且希望它们每个都能提供准确的数据时,您需要知道它们的相对物理位置。 位置传感器的天线通常安装在上部结构上方的高处,而运动传感器位于船只重心附近。它们两个的物理位置都远离深度传感器上的换能器,换能器可能位于靠近船首的位置。 通常,来自一个传感器的信息取决于来自另一个传感器的数据。因此,必须为这些相对距离补偿相关测量值。
示例
如果您想测量实际水深,您需要知道回声测深仪换能器到吃水线的垂直距离。由于船只的排水量随货物、燃料等数量的变化而变化,因此必须定期测量船体上吃水线的物理位置,或使用另一个传感器测量。
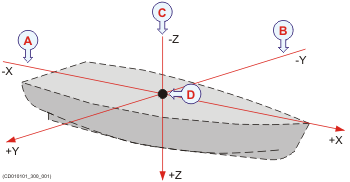
为了建立一个测量传感器之间相对距离的系统,我们建立了一个虚拟坐标系。该坐标系使用三个向量:X 轴、Y 轴和 Z 轴。
| A | X 轴是船只的纵向方向,与甲板平行。X 轴的正值表示传感器或参考点位于参考点(原点)的前面。 |
| B | Y 轴是船只的横向方向,与甲板平行。Y 轴的正值表示传感器或参考点位于参考点(原点)的右舷侧。 |
| C | Z 轴垂直,与桅杆平行。Z 轴的正值表示传感器或新参考点位于参考点(原点)的下方。 |
| D | 参考点(船只原点) |
坐标系原点
原点是船只坐标系中所有三个轴相交的共同参考点。 船只传感器(雷达和定位系统天线、回声测深仪和声纳换能器、动作参考装置等)的所有物理位置均以原点为参照。 在大多数情况下,船只的“正式”原点位置是由设计者或造船厂确定的。该原点通常使用物理标记进行标识,也会显示在船只图纸上。
常用位置包括:
| • | 船舵正上方船尾处(框架 0) |
| • | 船只重心 |
| • | 动作参考装置 (MRU) 的物理位置 |
坐标系替代原点
如有必要,可以为特定产品或目的定义其他原点位置。 一个示例是常用的导航参考点。每当对船只进行测绘以确定准确的偏移信息时,测绘员也可以确定替代原点位置。 在相关情况下,必须使用设计者或造船厂确定的“正式”原点的偏移值来定义任何此类替代位置。 常用的替代原点是船只动作参考装置 (MRU) 的物理位置。
定义每个传感器的物理位置
通过船只坐标系,可以使用 X 轴、Y 轴和 Z 轴的三个数值来定义每个传感器的物理位置。 这些值必须定义与单个参考点(原点)之间的垂直和水平距离。 动作参考装置 (MRU) 的物理位置通常是要定义的最重要的传感器。 对于许多系统,船只航向也是一个关键衡量因素。
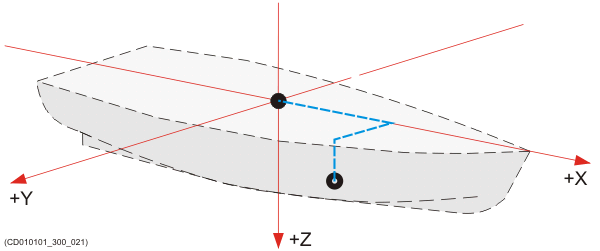
在本例中,建立了第二个参考点。它用 X 轴、Y 轴和 Z 轴的三个正偏移值进行定义。所有值都是正值,因为新的参考点位于原点的前面和下面,并且位于右舷侧。
X 轴、Y 轴和 Z 轴的三个数值的准确度定义了传感器数据的准确度。 如果您需要高准确度,例如水下定位、水下测绘或科学测量,则必须使用专业的大地测绘方法来定位每个传感器。 对于这种用途,良好的定线测绘对于产生高质量结果至关重要。 通常由训练有素的合格测绘员使用经过验证的测绘设备和方法进行测绘。