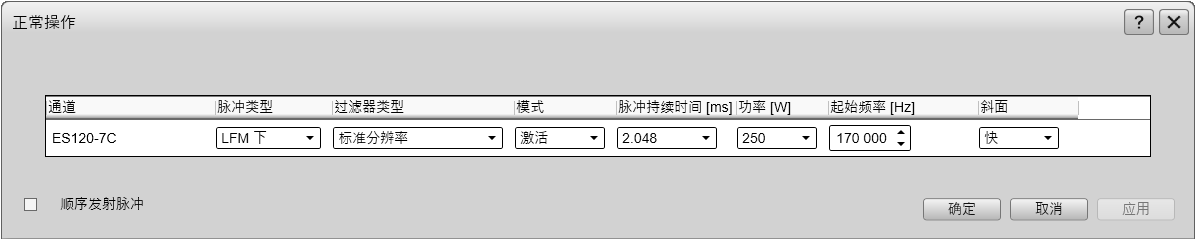
Normal Operation(正常操作)对话框
Normal Operation(正常操作)对话框的作用是为您提供当前收发器参数的概览。 它还允许您更改这些参数以满足当前的操作要求。

先决条件
只有当 EK80 在 Normal(正常)模式下运行时,Normal Operation(正常操作)对话框才可用。
如何打开
此对话框需要从 Operation(操作)菜单中打开。
描述
Normal Operation(正常操作)对话框列出了所有传输参数。 该对话框为使用中的每个通道提供一行参数。 在本文中,通道一词用作通用术语,用于识别收发器、换能器和工作频率的组合。 您可以更改参数。
如果您使用具有多路复用功能的收发器,则 Normal Operation(正常操作)对话框将分别显示每个多路复用通道。 可以为每个多路复用通道单独选择某些参数,其他参数必须是通用的。
注
Normal Operation(正常操作)对话框中的设置受换能器设置文件中的规格限制。 因此,您不能进行任何会损坏收发器或换能器的更改。 某些设置可能受您的许可证的限制。
除非您充分意识到后果,否则不要进行任何更改。
如果您想研究环境噪音,请在 Normal Operation(正常操作)对话框中选择 Passive(被动)模式。 然后将会(在换能器的频率范围内)探测并显示水中的任何噪音或干扰。 例如,此功能将能够从您自己的船只上或附近其他船只上的其他水声系统中拾取干扰。
EK80 支持使用频率扫描进行宽频带传输。 这通常称为“线性调频”,意味着传输脉冲内的传输频率从“起始”频率变为“最终”频率。 要使用频率扫描(“线性调频”)功能,您必须使用频率调制脉冲。 您还必须使用支持频率范围的换能器。
Extras(附加信息)菜单中提供的某些信息反映了 Normal Operation(正常操作)对话框中的设置。
注
某些设置专用于回声测深仪或 ADCP 操作。 目前支持以下 ADCP 系统:
| • | Simrad EC150-3C EC150-3C 是一种双用途装置。 它既可用作声学多普勒流速剖面仪 (ADCP) 来测量水流,也可用作分束回声测深仪。 它不能同时操作这两个功能。
|
详情
Channel(通道)
此列指定通道。 在本文中,通道一词用作通用术语,用于识别收发器、换能器和工作频率的组合。 文本字符串提供以下信息:
| • | 换能器名称 |
| • | 换能器序列号 |
如果您使用具有多路复用功能的收发器,则 Normal Operation(正常操作)对话框将分别显示每个多路复用通道。 可以为每个多路复用通道单独选择某些参数,其他参数必须是通用的。
Pulse Type(脉冲类型)
“Pulse Type (脉冲类型)”功能允许您选择传输脉冲(“ping”)的“形状”。
| • | CW |
| • | LFM |
缩写“CW”表示“连续波”。 “LFM”是指“线性调频”。
在 LFM Down(LFM 下)模式中,发射的脉冲始于探测范围内的高频,结束于探测范围内的低频。 频率扫描是线性的。 在 LFM Up(LFM 上)模式中,发射的脉冲始于探测范围内的低频,结束于探测范围内的高频。
注
要使用频率扫描(“线性调频”)功能,您必须使用频率调制脉冲。 您还必须使用支持频率范围的换能器。
只有宽频带收发器 (WBT) 支持 LFM Down(LFM 下)。 您的 WBT 必须安装最新的软件版本。
您只能在每个收发器的一个通道上使用 LFM Down(LFM 下)和 LFM Up(LFM 上)。 试图在多个通道上尝试这些模式将导致出现错误消息。
滤波器类型
可提供专用的接收滤波器。 此滤波器设置仅适用于 LFM 脉冲。
| • | 标准分辨率: 此滤波器设置采用与以前的 EK80 软件版本相同的带通滤波器和采样。 |
| • | 短: 此滤波器设置应用短时带通滤波器和尽可能最低的采样。 此设置通常会导致脉冲响应较短和输出采样率较高。 这些生成的回波数据可用于解决带通滤波器中的范围旁瓣问题,同时检查边界附近的目标。 请注意,滤波器的频率更宽,可能会降低信噪比。 |
注
除非您因边界问题而需要短时分辨率,否则我们建议您使用标准分辨率。 此设置可降低噪音和数据量 我们建议您使用将在测绘期间使用的 Filter Type(滤波器类型)设置来校准 EK80。
我们认为接收滤波器具有“试验性”,并邀请您查看结果。
此功能不适用于 ADCP 操作。
模式
此列指定当前收发器模式。 您可以手动选择适合当前操作的模式。
以下模式可用:
| • | Active(激活) 发射器和接收器均处于活动状态。这是正常操作模式。
|
| • | 被动 在 Passive(被动)模式下,EK80 将接收并计算换能器探测到的信号。 因此,该模式对于测试目的非常有用,当您想测量海洋中的环境背景噪音时,此模式也非常有用。 在 Passive(被动)模式下运行 EK80 也有助于区分目标回波(仅在 Active(主动)模式下存在)和噪音(在 Active(主动)和 Passive(被动)模式下都存在)。
|
| • | 测试 当接收器为主动时,发射器为被动。 此模式不适用于 EK80 涉及的操作。
|
Pulse Duration(脉冲持续时间)
Pulse Duration(脉冲持续时间)设置用于指定发射脉冲的当前持续时间(“长度”)。 您可以手动选择适合您操作的脉冲持续时间。
脉冲持续时间可以根据当前深度和您正在寻找的鱼的种类来选择。 您希望看到的越深,应选择的脉冲持续时间就较长。 但是,当使用 CW 传输时,长脉冲持续时间会降低分辨率。 它还会导致 EK80 的发射频率降低。 请记住,在 EK80 中,脉冲持续时间和带宽是相互依赖的。
对于 CW 传输:
| • | 长脉冲提供更长的探测范围。它们使 EK80 对噪音较不敏感,但提供更低的范围分辨率。 |
| • | 短脉冲提供更短的探测范围。它们使 EK80 对噪音更加敏感,但提供更高的范围分辨率。 |
对于 FM 传输:
| • | 长脉冲提供更长的探测范围,且范围分辨率与脉冲持续时间无关。 |
| • | 短脉冲提供更短的探测范围,且它们使 EK80 对噪音更敏感。 |
此参数的当前设置也显示在 Extras(附加信息)菜单中。
此功能不适用于 ADCP 操作。
功率
您可以调整 EK80 的输出功率。 您不能将功率增加到超过换能器的容量,但为了在浅水区中获得更好的性能,或者如果您正在努力应对回响,则可以降低功率。
Normal Operation(正常操作)对话框中的 Power(功率)参数显示发射器的输出功率(以瓦特为单位测量)。 您可以手动更改输出功率。 输出功率限制为换能器的最大额定值或发射器的最大额定值(以最小值为准)。 在所有实际用途中,这意味着您可以降低功率输出,但不能将其增加到超过换能器的额定功率。
此参数的当前设置也显示在 Extras(附加信息)菜单中。
起始/最终频率
Start Frequency(起始频率)和 End Frequency(最终频率)参数用于设置频率扫描(“线性调频”)。 如果起始频率和最终频率参数不可用,则相关通道上使用的换能器不支持宽频带传输。 要使用频率扫描(“线性调频”)功能,您必须使用频率调制脉冲。 您还必须使用支持频率范围的换能器。
注
您使用的换能器必须符合您选择的频率,这一点非常重要。 每个换能器的频率范围在换能器设置文件中定义。 如果您选择了不受支持的频率范围,则会显示错误消息。
此参数的当前设置也显示在 Extras(附加信息)菜单中。
此功能不适用于 ADCP 操作。
斜面
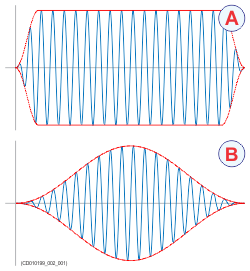
Normal Operation(正常操作)对话框中提供的 Ramping(斜面)参数定义了每个传输(“发射脉冲”)的输出电平可以多快地从 0 V 增加到最大电平。 有两个选项:Fast(快)和 Slow(慢)。
原理如图所示。曲线 (A) 的 Ramping(斜面)设置为 Fast(快),并且使用最少两 (2) 个到最多十 (10) 个周期,将电平从 0 V 增加到最大电平。在脉冲结束时,使用最多十个到最少两个周期来降低输出电平。
使用的周期数取决于所连接的换能器的品质因数(相对于中心频率的带宽)。斜面周期数的上限为半个脉冲长度内的周期数。
曲线 (B) 的 Ramping(斜面)设置为 Slow(慢)。使用脉冲持续时间的前半部分,将输出电平从 0 V 增加到最大电平。然后使用脉冲的后半部分降低输出电平。
此参数的当前设置也显示在 Extras(附加信息)菜单中。
此功能不适用于 ADCP 操作。
顺序发射脉冲
如果 EK80 上使用了多个通道,则可以使用 Sequential pinging(顺序发射脉冲)功能。 激活此功能后,每个收发器将依次逐个发射(“发射脉冲”)。 如果未激活此功能,所有收发器将同时“发射脉冲”。
如果在收发器上使用两个换能器,它们也会同时“发射脉冲”。
提示
如果您的换能器的定位方式会导致干扰问题,则顺序发射脉冲功能非常有用。
此参数的当前设置也显示在 BITE(内置测试设备)对话框中。 您将从“Setup (设置)”菜单打开“BITE”对话框。
此功能不适用于 ADCP 操作。
最快流速
Maximum Current Speed(最快流速)控制着 ADCP 操作的脉冲持续时间和处理功能。 您不需要频繁更改此设置。 根据测绘区域中的预期水流选择一个值。 如果您不确定,请选择高于预期水流的值,并根据经验相应减小。 您选择的值必须始终等于或大于预期值。
注
如果该值设置得过大,测量精度将会降低。
此功能仅适用于 ADCP 操作。
深度单元尺寸
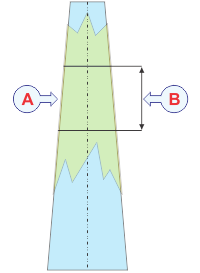
| A | 深度单元 |
| B | 深度单元尺寸 |
在水流测量中,单元一词用于描述深度单元(有时称为水箱)。 这些单元是声学多普勒流速剖面仪 (ADCP) 用于测量流速的均匀分段。
声学多普勒流速剖面仪 (ADCP) 通过声脉冲测量水流的速度和方向。 这些脉冲的持续时间由深度单元的当前尺寸决定。 每个波束都可以被视为从换能器表面向下到声束下端之间均匀放置的多个深度单元。
| • | 在浅水区中使用更小的深度单元。 |
| • | 在深水区中使用更大的深度单元。 |
较小的深度单元提供更佳的范围分辨率。 这使得探测流速中的微小深度变化变得更容易。 在深水区,较小的深度单元将逐渐受到越来越多的噪音的影响。 由于需要大量的处理操作,发射脉冲的速率也将降低。 较大的深度单元可以承受更多的噪音。 因此,必须使用较大的深度单元来测量深水区中的速度。
此功能仅适用于 ADCP 操作。