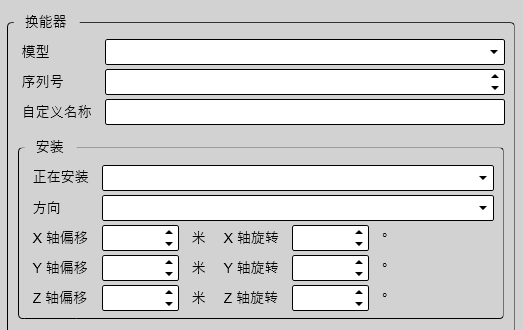
Transducer Installation(换能器安装)页面
您希望与 EK80 配合使用的换能器必须作为软件配置的一部分进行“安装”。 使用哪种换能器取决于系统中的收发器数量以及您拥有的许可证。 除非更换损坏的换能器或添加新的换能器,否则只需执行一次上述操作。
先决条件
在将 EK80 设置为 Replay(回放)模式时,Installation(安装)对话框不可用。
如何打开
此页面位于“Installation (安装)”对话框中。 要打开,请在 Setup(设置)菜单上选择它。

描述
必须分别选择和标识要添加到 EK80 配置中的每个换能器。
您只能从 Model(型号)列表中选择换能器。 选择换能器后,您必须提供其序列号,并输入您自己选择的名称。 一旦安装了换能器,它就会列在 Installed Transducers(已安装的换能器)框中。 要查看您收集的有关换能器的信息,请在列表中选择相关换能器。
提示
如果只是进行更改并在页面底部选择“OK (确定)”,这样并不会安装任何内容。 请选择要安装的内容,定义相关的参数,然后选择“Add (添加)”。
安装换能器后,您可以在 BITE(内置测试设备)对话框中验证其工作状态。
如果 EK80 只能与 ADCP 收发器配合使用以进行海流剖面分析,则无需安装其他换能器。
详情
已安装的换能器
Installed Transducers(已安装的换能器)框列出了 EK80 上当前安装的所有换能器。 在列表中选择一个换能器以编辑其属性或将其删除。 在列表中选择 New(新建)以将新的换能器添加到 EK80。
型号
添加新换能器时,您只能从列表中选择一个换能器。
该列表是从处理器单元上的系统文件中生成的。 它包含所有与宽频带收发器 (WBT) 兼容的换能器,但由于软件对于多个系统是通用的,因此列表中可能也有不兼容的换能器。 该列表还包括每个换能器的技术规格。 您无法查看此信息,但 EK80 使用此信息设置操作参数。 这使宽频带收发器 (WBT) 能够针对单个换能器型号优化其性能。
如果在列表中找不到您的换能器,请联系您的经销商升级 EK80 中的相关软件组件。
序列号
使用此框插入换能器的序列号。 拥有内置“智能”功能的 Simrad 换能器将自动提供此序列号。
自定义名称
输入要用于识别换能器的任何名称。 您选择的名称将仅用于在其他对话框中识别换能器。 它不用于导出的回波数据。
提示
如果您没有将计算机键盘连接到 EK80 系统,请选择 Keyboard(键盘)按钮以打开屏幕键盘。
安装
使用此功能指定换能器的安装位置。
安装在拖体内的换能器受支持。 拖体必须包括一个合适的深度传感器,以在 NMEA DPT 数据报中提供当前深度。 在此数据报中,第二个深度值(偏移值,以米为单位)必须包含拖体深度。 传感器连接到 处理器单元 上的通信端口。
如果您在拖体中安装换能器,请选择 Towed(拖曳)。
| • | 将 Orientation(方向)设置为 Vertical(垂直)。 |
| • | 将垂直安装偏移(Z 轴偏移)设置为换能器与拖体内深度传感器之间的距离。 |
拖体的深度显示在 Numerical(数值)信息窗格中。
提示
在某些 EK80 应用中,一个或多个换能器是朝上安装的。 为了根据此用途调整回波图显示界面,引入了 Beam Direction(波束方向)功能。 与传统的探鱼回声测深仪上的显示界面不同,您可以选择 Upwards(向上)模式。 然后,将对显示界面进行调整,以使位于回波图底部的换能器向上朝向海面。
方向
使用此功能指定换能器波束的方向。
示例
如果在安装换能器时,换能器面处于水平位置,则波束指向正下方。 然后必须选择 Vertical(垂直)方向。
Offsets(偏移)
EK80 换能器 的物理位置对于 EK80 数据准确度非常重要。 使用换能器面的中心作为参考,并定义与船只原点相关的偏移值。
注
这些设置用于安装 ADCP 收发器进行海流剖面分析。 这些信息不用于调整安装偏差,但将包含在 RAW 文件中,用于后处理目的。
| • | X 轴偏移: 选择 X 轴(艏艉方向)上相对于船舶原点的偏移距离值。 如果换能器位于船舶原点前方,请使用正值为 X 轴进行调整。 |
| • | Y 轴偏移: 选择 Y 轴(横向)上相对于船舶原点的偏移距离值。 如果换能器位于船舶原点右舷侧,请使用正值为 Y 轴进行调整。 |
| • | Z 轴偏移: 选择 Z 轴(垂直方向)上相对于船舶原点的偏移距离值。 如果换能器位于船舶原点下方,请使用正值为 Z 轴进行调整。 |
旋转
只要需要补偿旋转偏移,就可以使用旋转角度。 这些设置用于安装 ADCP 收发器进行海流剖面分析。
注
这些设置用于安装 ADCP 收发器进行海流剖面分析。 这些信息不用于调整安装偏差,但将包含在 RAW 文件中,用于后处理目的。
| • | X 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 X 轴之间(在船首和船尾方向)的任何偏差。 |
| • | Y 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 Y 轴之间(在横向方向)的任何偏差。 |
| • | Z 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 Z 轴之间(在垂直方向)的任何偏差。 |
示例
分束换能器有一个凹口或标记以指示前进方向。 分束换能器中的区段是以此前进方向为参照。 因此,请务必按照此箭头和 换能器 主体上的物理导向凸轮的指示安装 换能器。 如果在安装换能器时未对齐,您可以通过调整 Rotation Around Z(Z 轴旋转)来进行补偿。
连接
具有四个区段的分束换能器可通过物理方式连接到收发器,以作为单束换能器工作。 如果您已建立此连接,则必须勾选此框以使EK80相应地运行。 相关接线在 EK80 安装手册中进行了说明。
添加
当您将新换能器添加到EK80配置时,选择 Add(添加)以完成处理。 您添加的换能器位于 Installed Transducers(已安装的换能器)列表中。
Edit(编辑)
Transducer Installation(换能器安装)页面上的 Edit(编辑)功能可以更改您为换能器提供的信息。 您不能更改型号标识和序列号。 选择 Edit(编辑)进行相关更改。 选择 Apply Changes(应用更改)以保存所做的更改。
Remove(删除)
Transducer Installation(换能器安装)页面上的 Remove(删除)功能可以删除您为换能器提供的信息。
注
没有“撤消”功能。 当您从EK80配置中删除换能器时,您还会删除所有校准信息。 如果您稍后要重新安装相同的换能器,则必须重复校准。
返回至…
相关功能