ADCP Introduction
Measurement of current velocity using ADCP is based on the principle of Doppler shift. The Doppler effect (or the Doppler shift) is the change in frequency of a wave in relation to an observer who is moving relative
to the wave source. A common example of Doppler shift is the change of pitch heard when a vehicle sounding a horn approaches and recedes from
an observer. The reason for the shift in frequency is that the sound source moving towards the observer will transmit each sound wave a
little bit closer to the observer all the time. Each wave therefore takes slightly shorter time to reach the observer. When the transmitter has passed the observer, each sound wave will have to travel a little bit longer to reach the observer.
An acoustic Doppler current profiler (ADCP) system measures current velocity, speed and direction. The system uses a transceiver which transmits high frequency sound waves (beams). The transceiver determines the Doppler frequency shift of the return signal. The return signal is scattered from “drifters” in the water column. The drifters are species of planktonic organisms such as euphasiids and copepods.
Important
The drifters moves passively with the same velocity as the water current. The velocity of the water current is assumed homogeneous in the different levels of the water column. The frequency of the reflected sound is increased (or decreased) in direct proportion to the rate at which the drifters are
approaching the instrument.
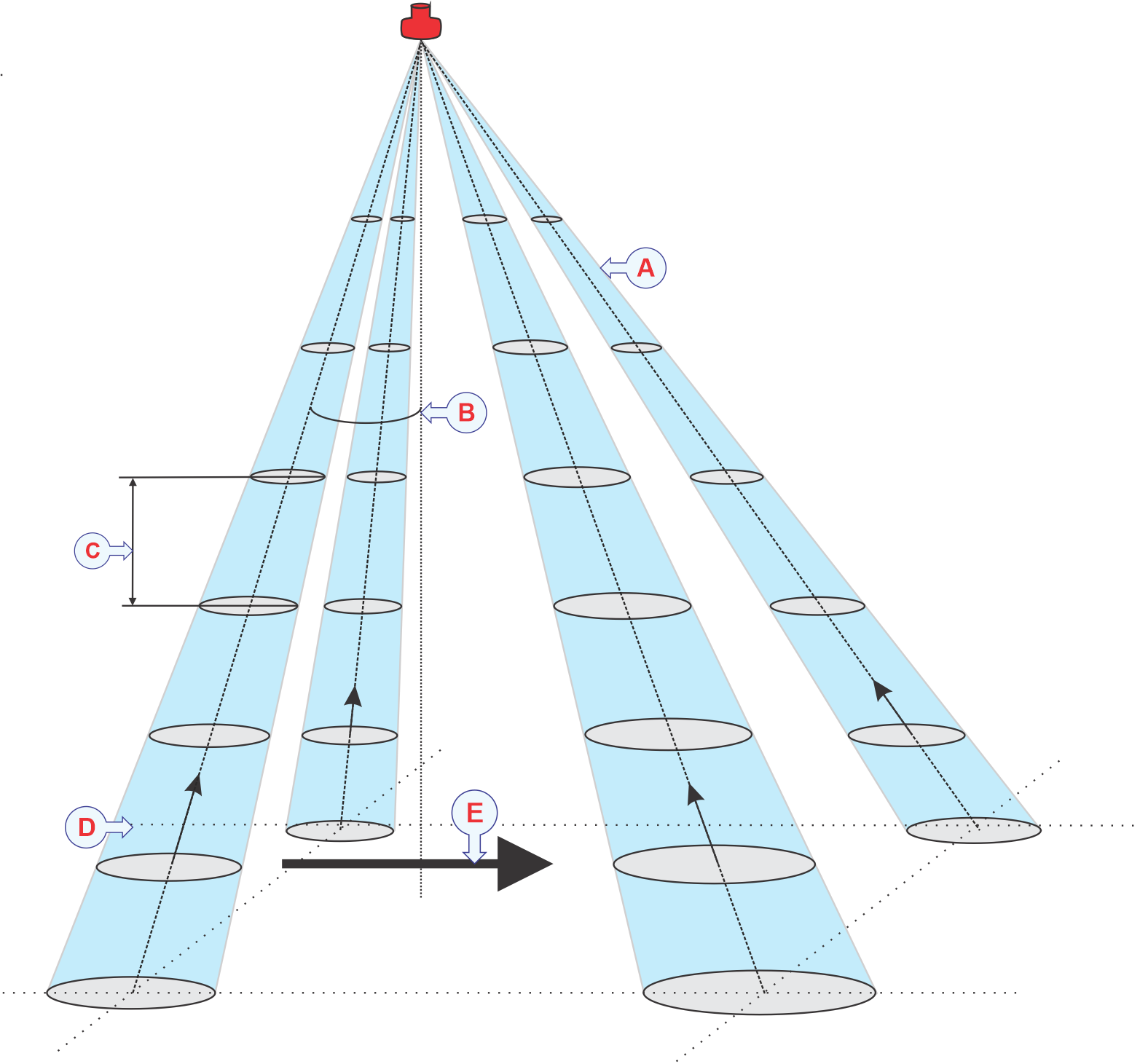
| A | The array transducer for ADCP uses four beams. |
| B | The angle between the centre line of each beam and the vertical line from the transducer is approximately 30 degrees. |
| C | Depth Cell - Velocity estimates at each depth are found by using the echoes from one depth cell. |
| D | The arrows mark 3D velocity components in a beam. Velocity measured in the beam’s directions are used to estimate velocity components. |
| E | Water current flow |
The ADCP system provides three major different types of data.
| • | Vessel speed when moving over the sea floor, also known as bottom-tracking. |
| • | Water current velocity in the water column. Water current velocity is measured in both vertical and horizontal direction. |
| • | Movement of fish and fish schools through the water. |
The ADCP data can be used in navigation, oceanography and fishery research.
The maximum range of the ADCP transducer corresponds to the location where the signal strength drops to levels comparable
to the noise level. Beyond this range the ADCP cannot accurately calculate Doppler shifts.