Description
The following information is provided in the Transducer list. Some of the settings are specific for echo sounder or ADCP operation.
|
• |
Model: This information identifies the type of transceiver in use. |
|
• |
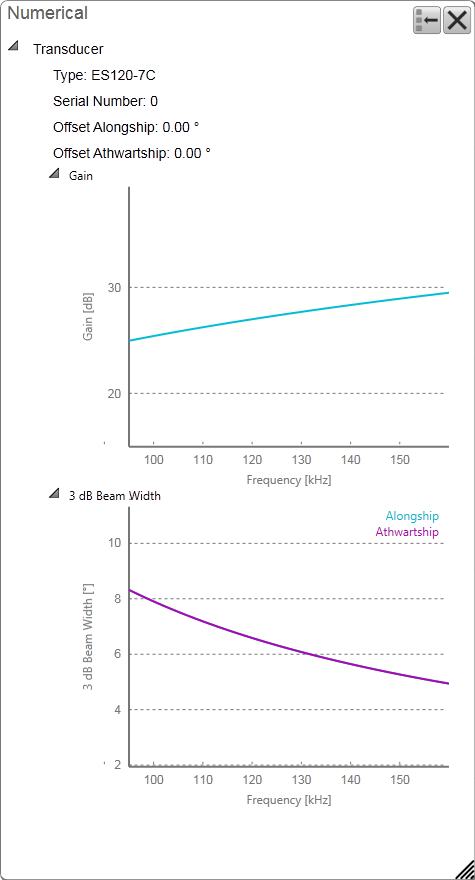
Type: The transducer model is identified. |
|
• |
Serial Number: This is the serial number of the transducer in use on the current channel. The information assumes that you have typed in the serial number when you installed the transducer in the user interface. This serial number is very important, because you will need it as a reference identification when the EK80 system is calibrated. |
|
• |
Offsets: These parameters identify the alongship and athwartship offset angles for the transducer. These offset angles are taken from the calibration results. |
|
• |
Gain: This curve shows the transducer gain (in dB) for different operational frequencies. |
|
• |
3dB Beamwidth: This curve shows the transducer beamwidth (in degrees) for different operating frequencies. |
|
• |
Sa correction: Sa is the area backscattering strength. The value reflects the corrections made after the EK80 calibration. |
|
• |
Beamwidth: These are the beamwidths in the alongship and athwartship directions. |
|
• |
Towed Body Depth: The parameter holds the current depth of the towed body. |
|
• |
Scale: The parameter holds the current marks and intervals of the views. |
|
• |
Yaw: The parameter holds the current heading of the vessel. A positive value indicates a rotation towards starboard. |
|
• |
Pitch:The parameter holds the current rotation upwards or downwards for the vessel. A positive value indicates a rotation upwards. |
|
• |
Roll:The parameter holds the current tilting of the vessel in its longitudinal axis. A positive value indicates a rotation towards starboard side downwards. |