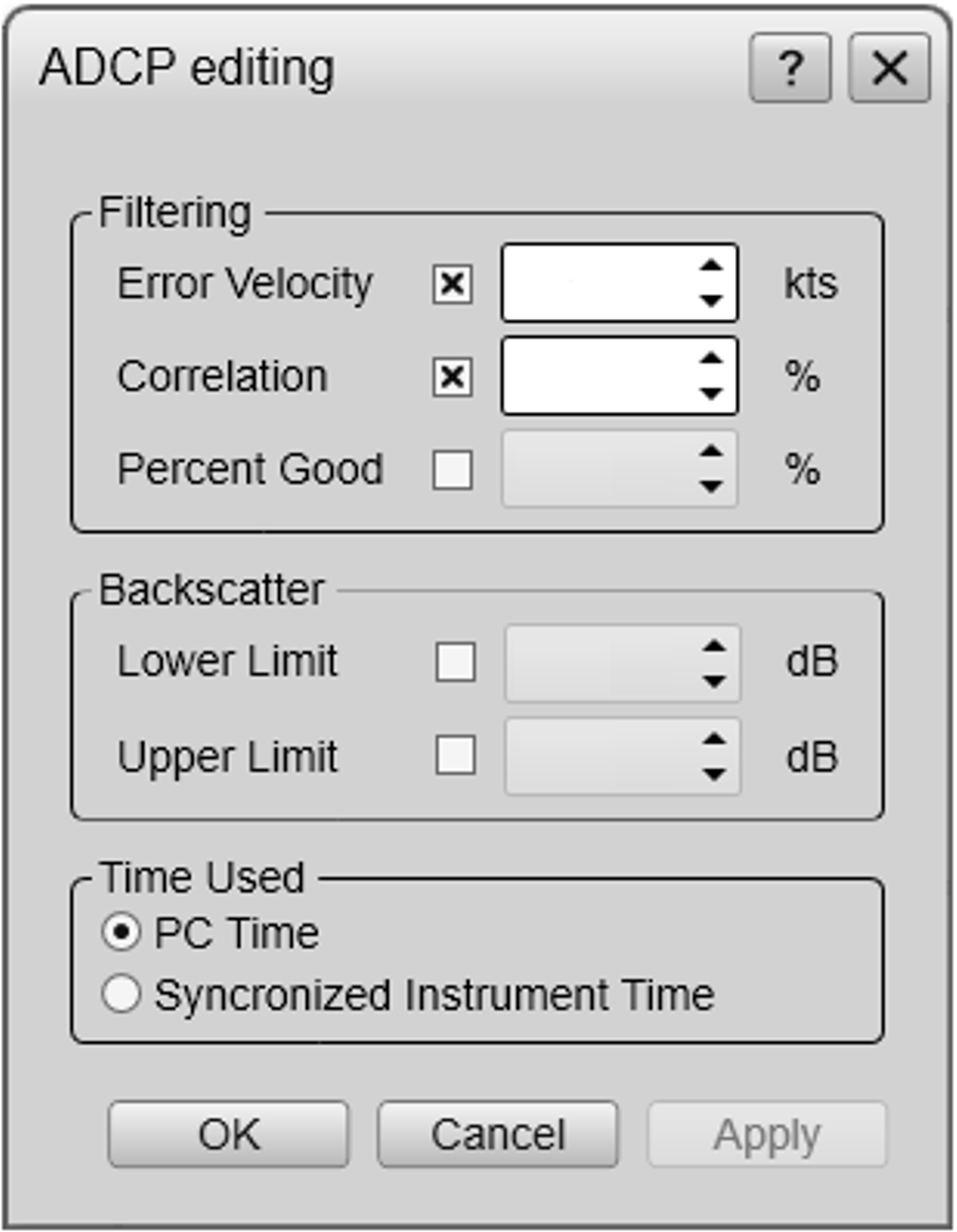
ADCP Editing dialog box
The ADCP Editing dialog box offers filters to improve the velocity measurements. You can enable and disable these filters individually. It is possible to configure the individual filters and adjust the accepted backscatter values.

How to open
You open this dialog box from the Active menu.
Description
Well defined filter settings are provided to increase the quality of the ADCP measurements. Values outside the defined filter threshold are not used in the calculation of current velocity.
| • | Error Velocity |
| • | Correlation |
| • | Percent Good |
Echo intensity is also used to refine the ADCP measurements. By filtering out echoes with low or high intensity, those echoes relating from obstructions and schools of fish may be removed
from the calculations.
The ADCP Editing dialog box also allows you to define the source for the time stamps on your ADCP data.
Details
Error Velocity
Error velocity is the difference between two estimates of the vertical velocity. It is a measure of variability in the velocity data. The filter compares the error velocity to a defined threshold. If the Error Velocity is greater than the threshold level, the velocity from all the beams are removed from the data. If you set the Error Velocity threshold to a very high value you will effectively disable the filter and admit all beams. Low error velocity indicates the velocities in the ADCP beams are homogenous and of high quality.
The Error Velocity filter applies to the Vessel Velocity and Geo Velocity views. Error Velocity is measured in m/s or knots.
Correlation
Correlation is a measure of similarity between the two sets of received echoes. The test is based on beam velocity echoes,
ie. velocity along the beam direction If the difference is small, correlation is high and the signal sequences are similar.
If the correlation for any of the beams is smaller than the selected threshold value, that measurement is removed from the
data. The correlation decreases with distance from the transducer. Of you set the Correlation threshold to 0 (zero) you will disable the filter.
The Correlation filter applies to the Beam Velocity, Vessel Velocity and Geo Velocity views. Correlation is measured in percent.
Percent Good
The term percent good is commonly used to describe the total remaining value of an asset after a certain time compared to the value of the original
asset. In our context, the term is used both as a measure and a filter setting.
Out of a total number of pings selected for averaging only a percentage are admitted through the Error Velocity and Correlation
filters. These are used to provide an average value for the ADCP calculations. Since the filtering is done for each depth the number of admitted pings can vary from one depth to another.
By selecting a Percent Good filter threshold you can discard information with a low percent good value.
Example
If Ping Average is set to 100 and only 50 pings are admitted for a certain depth, the percent good value is 50%. If you set the Percent Good filter threshold to 60% no velocify calculations are made for this depth.
Reasons for experiencing low percent good values include low correlation, large error velocity, or and fish detections. The Percent Good filter ensures that the minimum number of samples and minimum theoretical standard deviation in the data are met.
The Percent Good filter applies to the Vessel Velocity and Geo Velocity views. When the Percent Good filter is enabled, velocity estimates with a percent good value below the specified threshold are removed from the ADCP data.
Backscatter
Backscatter thresholds can be used to filter echo intensity. When enabled, echoes outside the upper and/or lower limits are not used to estimate velocity.
Backscatter from larger objects can overwhelm backscatter from smaller particles in the water column. You can set these thresholds to shift focus between the velocity of the water current and speed of a school of fish or other
objects.
Time Used
Correct timestamps in the ADCP data is important for post-processing purposes. Synchronization of the motion sensor and the EK80/ADCP system using an NTP server is a requirement. This improves the measurement accuracy.
| • | Select PC Time to use the time defined by the Processor Unit. |
| • | Select Synchronized Instrument Time to use the time defined by an external NTP server. |
Related topics
Related dialog boxes