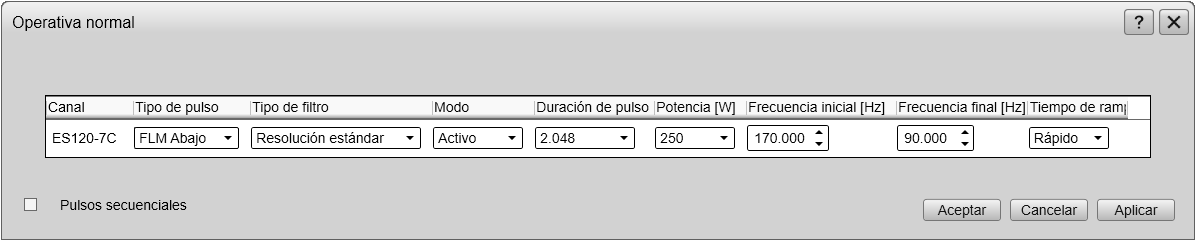
Cuadro de diálogo Operativa normal
El propósito del cuadro de diálogo Normal Operation (Operativa Normal) es proporcionar una vista general de los parámetros actuales del transceptor. También permite cambiar estos parámetros para ajustarse a los requisitos operativos actuales.

Requisitos
previos
El cuadro de diálogo Operativa normal solo está disponible cuando el sistema EK80 opera en modo Normal.
Cómo
abrir
El cuadro de diálogo se abre desde el menú Operativa.
Descripción
El cuadro de diálogo Normal Operation (Operativa Normal) muestra todos los parámetros de transmisión. El cuadro de diálogo proporciona una fila para cada canal en uso. En este contexto, la expresión "canal" es un término que suele utilizarse para identificar la combinación del transceptor,
el transductor y la frecuencia operativa. Puede modificar los parámetros.
Si utiliza un transceptor con función de multiplexación, el cuadro de diálogo Normal Operation (Operativa Normal) presenta cada canal multiplexado por separado. Algunos de los parámetros pueden elegirse de manera individual para cada canal multiplexado, mientras que otros parámetros
deben ser comunes.
Nota
Los ajustes del cuadro de diálogo Normal Operation (Operativa Normal) están limitados por las especificaciones del archivo de configuración del transceptor. Por tanto, no puede realizar ningún cambio que vaya a dañar su transceptor o su transductor. Ciertos ajustes pueden verse limitados por su licencia.
No haga cambios a menos que sea plenamente consciente de las consecuencias.
Si desea estudiar el ruido ambiental, elija el modo Pasivo en el cuadro de diálogo Operativa normal. Se detectará entonces y mostrará cualquier ruido o perturbación en el agua (dentro del rango de frecuencias del transductor). Esta característica será por ejemplo capaz de coger perturbaciones procedentes de otros sistemas hidroacústicos que haya en
el propio barco, o en otros barcos cercanos.
El sistema EK80 soporta transmisiones de banda ancha utilizando barridos de frecuencia. Esto es lo que se conoce como "chirp", y significa que la frecuencia de transmisión cambia de una frecuencia "inicial" a una
"final" durante la transmisión. Para utilizar la función barrido de frecuencia ("chirp"), debe utilizar pulsos de frecuencia modulada. También debe utilizar un transductor que soporte el rango de frecuencias.
Parte de la información proporcionada en el menú Extras refleja los ajustes del cuadro de diálogo Operativa normal.
Nota
Algunos ajustes son específicos de la ecosonda y de la operativa ADCP. Actualmente se soportan los siguientes sistemas ADCP:
| • | Simrad EC150-3C La unidad EC150-3C tiene dos propósitos. Puede utilizarse tanto como un instrumento perfilador acústico de corriente por efecto Doppler (ADCP) para medir la corriente
de agua o como una ecosonda split-beam. No puede llevar a cabo estas dos funciones de manera simultánea.
|
Detalles
Canal
Esta columna identifica el canal. En este contexto, la expresión "canal" es un término que suele utilizarse para identificar la combinación del transceptor,
el transductor y la frecuencia operativa. La cadena de texto proporciona la siguiente información:
| • | Nombre del transductor |
| • | Número de serie del transductor |
Si utiliza un transceptor con función de multiplexación, el cuadro de diálogo Normal Operation (Operativa Normal) presenta cada canal multiplexado por separado. Algunos de los parámetros pueden elegirse de manera individual para cada canal multiplexado, mientras que otros parámetros
deben ser comunes.
Tipo de Pulso
La función Pulse Type (Tipo de Pulso) le permite seleccionar la "forma" de los pulsos transmitidos.
| • | CW |
| • | LFM |
La abreviatura "CW" significa "Continuous Wave" ("Onda Continua"). "LFM" significa "Modulación Lineal de la Frecuencia".
En LFM Down (LFM Abajo), el pulso transmitido empieza utilizando una frecuencia superior en el alcance y acaba con una frecuencia más
baja. El barrido de frecuencia es linear. En LFM Up (LFM Arriba), el pulso transmitido empieza utilizando una frecuencia más baja en el alcance y acaba con una frecuencia más
alta.
Nota
Para utilizar la función barrido de frecuencia ("chirp"), debe utilizar pulsos de frecuencia modulada. También debe utilizar un transductor que soporte el rango de frecuencias.
Solo el Transceptor de Banda Ancha (WBT) acepta el modo LFM Down (LFM Abajo). Su WBT debe estar equipado con la última versión del software.
Solo puede utilizar LFM Down (LFM Abajo) and LFM Up (LFM Arriba) en un canal de cada transceptor. Cualquier intento de probar estos modos en más de un canal resultará en un mensaje de error.
Tipo de Filtro
Está disponible un filtro receptor dedicado. Este ajuste de filtro solo está disponibles para pulsos LFM.
| • | Resolución estándar: Este ajuste de filtro aplica los mismos filtros paso banda y diezmados que las versiones de software del sistema EK80 anteriores. |
| • | Corto: Este ajuste de filtro aplica filtros paso banda cortos y el menor diezmado posible. Este ajuste resultará generalmente en una respuesta de impulso más corta y una cadencia de muestreo de salida más alta. Estos datos de eco resultantes pueden utilizarse para abordar problemas en el lóbulo lateral del alcance en los filtros paso banda mientras examina blancos cercanos a los bordes. Tenga en cuenta que el filtro es más ancho en frecuencia y puede resultar en una relación señal/ruido reducida. |
Nota
A menos que necesite una resolución corta a causa de los bordes, le sugerimos que utilice una resolución estándar. Este ajuste reduce tanto el ruido como la cantidad de datos. Le recomendamos que calibre su sistema EK80 con el ajuste Filter Type (Tipo de filtro) que utilizará durante el levantamiento.
Consideramos el filtro receptor como "experimental" y le invitamos a que reseñe los resultados.
Esta funcionalidad no está disponible cuando ADCP está activado.
Modo
Esta columna especifica el modo actual del transceptor. Puede seleccionar manualmente el modo que se ajuste a la operativa actual.
Los siguientes modos están disponibles:
| • | Activo El transmisor y el receptor están activos. Es el modo normal para la operativa.
|
| • | Pasivo En el modo Passive (Pasivo), el sistema EK80 recibirá y computará las señales detectadas por el (los) transductor(es). Por tanto, este modo resulta útil para realizar pruebas y para cuando quiera medir el ruido de fondo ambiental en el mar. También puede ser útil para ejecutar el sistema EK80 en modo Passive (Pasivo) para discriminar entre ecos de blanco (presentes solo en modo Active (Activo)) y ruido (presente en los modos Active (Activo) y Passive (Pasivo)).
|
| • | Prueba El transmisor está pasivo mientras el receptor está activo. Este modo no está diseñado para utilizarse con el sistema EK80.
|
Duración de Pulso
El ajuste Pulse Duration (Duración de Pulso) especifica la duración actual ("longitud") del pulso transmitido. Puede seleccionar manualmente la duración del pulso que se ajuste a su operativa.
La duración de pulso puede ser seleccionada de acuerdo con la profundidad actual y el tipo de peces que esté buscando. Cuanto más profundo desee ver, más larga debería ser la duración de pulso seleccionada. Sin embargo, cuando utilice transmisiones CW, una duración de pulso larga reducirá la resolución. También provocará que el sistema EK80 transmita de manera menos frecuente. Recuerde que en el sistema EK80 la duración del pulso y el ancho de banda son interdependientes.
Para transmisiones CW:
| • | Pulsos largos proporcionan mayor alcance de detección. Hacen que el sistema EK80 sea menos sensible al ruido pero ofrece menor resolución de alcance. |
| • | Pulsos cortos proporcionan menor alcance de detección. Hacen que el sistema EK80 sea más sensible al ruido pero ofrece mayor resolución de alcance. |
Para transmisiones FM:
| • | Los pulsos largos proporcionan un alcance de detección más largo, y la resolución del alcance es independiente a la duración del pulso. |
| • | Los pulsos más cortos proporcionan un alcance de detección más corto y hacen que el sistema EK80 sea más sensible al ruido. |
El ajuste actual de este parámetro también se muestra en el menú Extras.
Esta funcionalidad no está disponible cuando ADCP está activado.
Potencia
Es posible ajustar la potencia de salida del sistema EK80. La potencia no puede superar la capacidad del transductor pero sí puede reducirla para un mejor rendimiento en aguas someras
o si tiene problemas con la reverberación.
El parámetro Power (Potencia) en el cuadro de diálogo Normal Operation (Operativa Normal) muestra la potencia de salida del transmisor en vatios. Puede cambiar manualmente la potencia de salida. La potencia de salida está limitada a la capacidad nominal máxima del transductor o a la capacidad máxima del transductor
o a la capacidad nominal máxima del transmisor, la que sea menor A efectos prácticos, esto significa que puede reducir la potencia de salida, pero no puede aumentarla más allá de la potencia
nominal del transductor.
El ajuste actual de este parámetro también se muestra en el menú Extras.
Frecuencia Inicial/Final
Los parámetros Start Frequency (Frecuencia Inicial) y End Frequency (Frecuencia Final) se utilizan para configurar un barrido de frecuencia ("chirp"). Si los parámetros para la frecuencia inicial y la final no están disponibles, el transductor utilizado en el canal relevante
no soportará transmisiones de banda ancha. Para utilizar la función barrido de frecuencia ("chirp"), debe utilizar pulsos de frecuencia modulada. También debe utilizar un transductor que soporte el rango de frecuencias.
Nota
Es muy importante que el transductor que utilice cumpla con las frecuencias elegidas. El rango de frecuencias de cada transductor se define en el archivo de configuración del transductor. Si elige un rango de frecuencias no soportado, aparecerá un mensaje de error.
El ajuste actual de este parámetro también se muestra en el menú Extras.
Esta funcionalidad no está disponible cuando ADCP está activado.
Tiempo de rampa
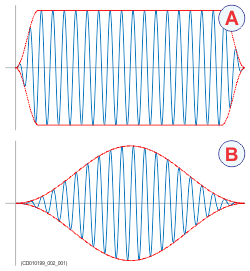
El parámetro Ramping (Tiempo de rampa) proporcionado en el cuadro de diálogo Normal Operation (Operativa normal) define la rapidez a la que debe aumentar el nivel de salida de cada transmisión ("pulso") de 0 V al nivel
máximo. Tiene dos opciones: Fast (Rápido) y Slow (Lento).
El principio se muestra en la ilustración. En la curva (A) el tiempo de Rampa es Rápido y el nivel aumenta de 0 V al nivel máximo usando desde un mínimo de dos (2) a un máximo de diez (10) ciclos. Al final del
pulso, un máximo de diez y un mínimo de dos ciclos se usarán para reducir el nivel de salida.
El número de ciclos usado depende del factor q (ancho de banda relativo a la frecuencia central) para el transductor conectado.
El número de ciclos de rampa tendrá un límite superior dado por el número de ciclos en media longitud de pulso.
El tiempo de Rampa de la Curva (B) es Bajo. El nivel de salida aumenta de 0 V a un nivel máximo usando la primera mitad de la duración del pulso. Por tanto, la segunda
mitad del pulse se usa para reducir el nivel de salida.
El ajuste actual de este parámetro también se muestra en el menú Extras.
Esta funcionalidad no está disponible cuando ADCP está activado.
Pulsos secuenciales
La función Sequential pinging (Pulsos secuenciales) puede utilizarse si hay más de un canal en uso en el sistema EK80. Cuando esté activada, cada transceptor transmitirá ("pulsos") de forma secuencial, de uno en uno. Cuando no esté activada, todos los transceptores transmitirán "pulsos" de forma simultánea.
Si se utilizan dos transductores en un transceptor, estos también transmitirán "pulsos" de forma simultánea.
Consejo
La función Sequential pinging (Pulsos secuenciales) puede resultar muy útil si sus transductores están ubicados de tal manera que la interferencia es un
problema.
El ajuste actual de este parámetro se muestra también en el cuadro de diálogo BITE (Equipo de Prueba Incorporado). El cuadro de diálogo BITE se abre desde el menú Configurar.
Esta funcionalidad no está disponible cuando ADCP está activado.
Máx(ima) Velocidad de Corriente
Maximum Current Speed (Velocidad máxima de la corriente) controla la duración del pulso y la función de procesamiento para operativas ADCP. No es necesario que realice cambios frecuentes en este ajuste. Seleccione un valor basado en las corrientes de agua esperadas en su área de levantamiento. Si no está seguro, elija un valor por encima de la corriente de agua esperada y redúzcalo según su experiencia. El valor que elija debe ser siempre igual o mayor que el valor esperado.
Nota
La precisión de medida se reduce si el valor es demasiado grande.
Esta funcionalidad solo está disponible cuando ADCP está activado.
Tamaño Celda Profundidad
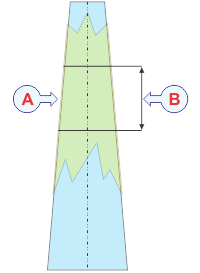
| A | Celda profundidad |
| B | Tamaño celda profundidad |
En medidas de corriente de agua, la expresión celda se utiliza para describir una celda de profundidad (a la que a veces se
le denomina bins). Estas son segmentos uniformes que utiliza el perfilador acústico de corriente Doppler (ADCP) para medir la velocidad de la
corriente.
El perfilador acústico de corriente por efecto Doppler (ADCP) mide la velocidad y la dirección de la corriente de agua por
medio de pulsos acústicos. Estos pulsos tienen una duración determinada por el tamaño actual de la celda de profundidad. Cada haz puede verse como un número de celdas de profundidad colocadas uniformemente desde la superficie del transductor hacia
abajo hasta el extremo inferior del haz acústico.
| • | Utilice celdas de profundidad menores en aguas más someras. |
| • | Utilice celdas de profundidad mayores en aguas más profundas. |
Una celda de profundidad pequeña ofrece mejor resolución de alcance. Esto facilita la detección de pequeñas variaciones de profundidad en la velocidad de corriente. En aguas más profundas, una celda de profundidad pequeña sufrirá más y más ruido gradualmente. El ratio de pulso también se reducirá debido a la gran cantidad de procesamiento que se requiere. Una celda de profundidad mayor tolera más ruido. Por esta razón, deben utilizarse celdas de profundidad mayores para medir la velocidad en aguas profundas.
Esta funcionalidad solo está disponible cuando ADCP está activado.