Página Instalación del Sensor
Para que el sistema EK80 utilice y ofrezca una correcta información de navegación, se deben conectar uno o más sensores externos. Los sensores típicos son aquellos que proporcionan información de navegación (rumbo, velocidad o posición geográfica). Utilice la página Sensor Installation (Instalación del sensor) para definir desde qué sensores externos importará información su EK80. También debe especificar qué formatos de datagrama utilizar. Para cada sensor relevante debe introducir los valores del offset que definen su localización física relativa al sistema de
coordenadas del barco.
Requisitos
previos
El cuadro de diálogo Instalación no está disponible cuando el sistema EK80 está en modo Reproducir.
Cómo
abrir
Esta página se encuentra en el cuadro de diálogo Instalación. Para abrir la página, seleccione Instalación en el menú Configurar.

Descripción
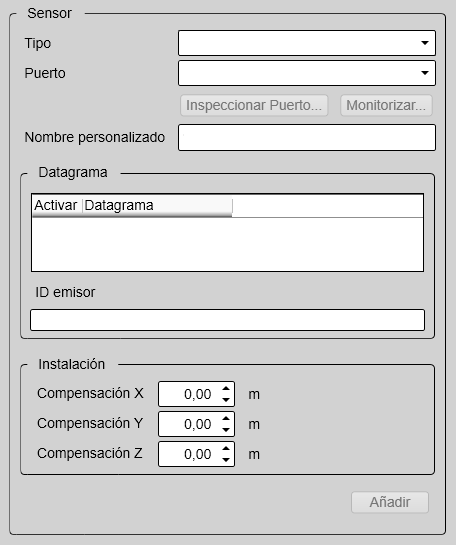
La página Instalación del sensor permite al sistema EK80 comunicarse con sensores y sistemas externos. Los parámetros están organizados en grupos.
| • | Sensores instalados La lista Installed Sensors (Sensores Instalados) contiene todos los sensores que están actualmente instalados en el sistema EK80. Seleccione un sensor de la lista para editar sus propiedades de interfaz, o para eliminarlo. Seleccione New (Nuevo) en la lista para añadir una nueva interfaz de sensor al sistema EK80.
|
| • | Sensor En el grupo Sensor se selecciona el tipo de sensor desde el cual se desea recibir información. Debe especificar el puerto de comunicación a utilizar (LAN (Red de Área Local) o puerto serie). Puede escribir un nombre personalizado para identificar la importación del sensor. Seleccione Inspect Port (Inspeccionar Puerto) para comprobar que los parámetros de comunicación del puerto elegido se han configurado correctamente.
|
| • | Datagrama En la lista de formatos válidos de datagrama, seleccione el(los) formato(s) a aceptar por el sistema EK80. De ser necesario, se puede especificar también un ID emisor concreto.
|
| • | Instalación La mayoría de los sensores se montan físicamente en el barco. Para unas medidas precisas, el sistema EK80 debe conocer la ubicación del sensor (en referencia al sistema de coordenadas del barco).
|
Nota
El hecho de realizar cambios y seleccionar Aceptar en la parte inferior de la página no instalará nada. Seleccione qué instalar, defina los parámetros relevantes y luego seleccione Añadir.
En el cuadro de diálogo BITE (Equipo de Prueba Incorporado) se proporciona un resumen de todos los sensores que hay conectados al sistema EK80.
Detalles
Sensores instalados
La lista Installed Sensors (Sensores Instalados) contiene todos los sensores que están actualmente instalados en el sistema EK80. Seleccione un sensor de la lista para editar sus propiedades de interfaz, o para eliminarlo. Seleccione New (Nuevo) en la lista para añadir una nueva interfaz de sensor al sistema EK80.
Tipo
El sistema EK80 se puede comunicar con varios tipos de sensores diferentes. Utilice esta lista para seleccionar el tipo de sensor desde el cual desea recibir información.
Consejo
La página Sensores en el cuadro de diálogo BITE (Equipo de Prueba Incorporado) proporciona una vista general de todos los sensores y líneas de comunicación en uso. Se proporciona toda la información de estado relevante. El cuadro de diálogo BITE se abre desde el menú Configurar.
Puerto
Para importar los datos desde el sensor elegido es necesario definir un puerto de entrada. Puede ser cualquier Red de Área Local (LAN) o línea serie disponible en la Unidad Procesadora.
Recomendamos que configure los parámetros de comunicación relevantes antes de utilizar el puerto. Para configurar los parámetros de comunicación, utilice la página Configuración E/S. La página Configuración E/S se encuentra en los cuadros de diálogo Instalación y Salida.
Inspeccionar Puerto
Seleccione Inspect Port (Inspeccionar Puerto) para comprobar los parámetros de comunicación del puerto elegido. Se abre el cuadro de diálogo para configurar el puerto.
Los parámetros de comunicación definidos para NMEA 0183 son:
| • | Tasa de Baudios: 4800 bit/s |
| • | Bits de datos: 8 |
| • | Paridad: Par |
| • | Bits de parada: 1 |
Algunos instrumentos pueden ofrecer otros parámetros y/u opciones. Siempre se debe comprobar la documentación técnica relevante facilitada por el fabricante.
Nota
No se permite realizar cambios. Para cambiar los parámetros de comunicación, utilice la página Configuración E/S. La página Configuración E/S se encuentra en los cuadros de diálogo Instalación y Salida.
Monitorizar
Esta opción solo está disponible si decidió editar los parámetros de un sensor instalado previamente. Seleccione Monitorizar para abrir el cuadro de diálogo Monitorizar Puerto. El cuadro de diálogo Monitorizar Puerto permite estudiar el flujo de comunicación de la línea serie o puerto LAN que se ha elegido.
Nombre personalizado
Para identificar fácilmente la interfaz del sensor, puede escribir un nombre personalizado. Este nombre aparece en otros cuadros de diálogo de la interfaz de usuario del sistema EK80. Si no hay un teclado conectado al sistema EK80, seleccione el botón Teclado para abrir un teclado virtual en pantalla.
Datagrama
La lista presenta los formatos de datagrama disponibles para el tipo de sensor elegido. Seleccione los datagramas que desea importar.
| • | Al seleccionar el tipo de sensor ITI-FS, solo se puede seleccionar un datagrama; Datagramas ITI-FS. Es un grupo de datagramas que permite al sistema EK80 importar información desde sistemas de red. |
| • | Al seleccionar el tipo de sensor PI50, solo se puede seleccionar un datagrama; Datagramas PI50. Es un grupo de datagramas que permite al sistema EK80 importar información desde sistemas de monitorización de capturas. |
ID Emisor
Si se desea especificar una ID Emisor en el formato de datagrama, se puede definir aquí.
Cada datagrama NMEA comienza con un símbolo de dólar. A continuación, sigue una etiqueta de "identificación de emisor" con
dos caracteres. Esta identificación está seguida por tres caracteres que definen el tipo de mensaje. La ID Emisor identifica
el sistema que envía el datagrama. Puede dejar este cuadro en blanco. Esto significa que se insertan dos caracteres en blanco en el datagrama. También puede especificar dos caracteres que identifiquen al sistema EK80 como el emisor. En la mayoría de los casos, solo necesitará definir una ID Emisor si el sistema de recepción lo necesita para propósitos concretos.
Ejemplo
$ESDBT,x.x,f,y.y,M,z.z,F*hh<CR><LF>
En este datagrama NMEA de profundidad, la ID Emisor es "ES", que significa "ecosonda".
Consejo
Si no hay un teclado conectado al sistema EK80, seleccione el botón Teclado para abrir un teclado virtual en pantalla.
Offsets
La ubicación física de cada sensor se debe definir teniendo como referencia el sistema de coordenadas del barco.
La posición de ciertos sensores se debe definir como un offset al Origen del Barco en el sistema de coordenadas para maximizar
el rendimiento. Estos valores offset se solicitan para hacer que el sistema EK80 ofrezca la información más precisa posible. El grado de precisión ofrecido por el sistema EK80 está relacionado directamente con la precisión de la información que se introduzca en las páginas Parámetros de Instalación.
| • | Offset X: Seleccione el valor offset en el eje X (dirección longitudinal) del Origen del barco. Ajuste con un valor positivo para X si el sensor está situado delante del origen del barco. |
| • | Offset Y: Seleccione el valor offset en el eje Y (transversal) del Origen del barco. Ajuste con un valor positivo para Y si el sensor está situado a estribor del origen del barco. |
| • | Offset Z: Seleccione el valor offset en el eje Z (vertical) del Origen del barco. Ajuste con un valor positivo para Z si el sensor está situado bajo el origen del barco. |
Rotación
Para algunos sensores (normalmente sensores de movimiento y transductores), la ubicación física del sensor no es suficiente
para extraer datos precisos. Estos sensores se instalan con ángulos físicos. A menudo, a estos ángulos se les denomina "ángulos de instalación" o "ángulos offset". El sensor puede rotar alrededor de los tres ejes del sistema de coordenadas del barco.
| • | Rotación alrededor de X (Balanceo) |
| • | Rotación alrededor de Y (Cabeceo) |
| • | Rotación alrededor de Z (Guiñada) |
En la interfaz de usuario del sistema EK80 solo necesitará especificar los ángulos de instalación cuando se muestren los parámetros.
| • | Rotación alrededor de X: Especifique un ángulo (en grados) para compensar cualquier desviación del eje X (dirección longitudinal) en el sistema de coordenadas. |
| • | Rotación alrededor de Y: Especifique un ángulo (en grados) para compensar cualquier desviación del eje y (dirección transversal) en el sistema de coordenadas. |
| • | Rotación alrededor de Z: Especifique un ángulo (en grados) para compensar cualquier desviación del eje Z (dirección vertical) en el sistema de coordenadas. |
Añadir
Cuando haya configurado los parámetros para la interfaz de un nuevo sensor, seleccione Añadir para guardarlo. Cuando se añade un sensor a la configuración del sistema EK80, aparece en la lista Sensores instalados.
Eliminar
La lista Installed Sensors (Sensores Instalados) contiene todos los sensores que están actualmente instalados en el sistema EK80. Si desea eliminar un sensor, selecciónelo en la lista y luego seleccione Eliminar en la parte inferior de la página Instalación del sensor.
Nota
Esta operación no se puede deshacer.
Editar
La lista Installed Sensors (Sensores Instalados) contiene todos los sensores que están actualmente instalados en el sistema EK80. Si desea editar los parámetros de un sensor instalado previamente, selecciónelo en la lista y luego seleccione Editar en la parte inferior de la página Instalación del sensor.
Volver a...
Tareas relacionadas
Descripciones conceptuales