噪音页面
EK80系统的运行性能取决于噪音条件。 噪音特征必须尽可能低。
如何打开
此页面位于 BITE 对话框中。 您将从“Setup (设置)”菜单打开“BITE”对话框。
描述
Noise(噪音)页面提供了有关当前估计噪音和等效环境噪音的信息。 您的EK80系统必须设置为 Passive(被动)模式。
提示
如果要切换到 Passive(被动)模式,请使用 Normal Operation(正常操作)对话框。 Normal Operation(正常操作)对话框位于 Operation(操作)菜单上。
LFM 传输
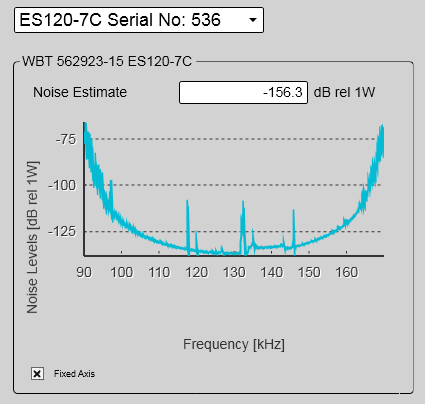
当您使用 LFM 传输时,噪音会出现在绘图中。 绘图显示了噪音水平与传输频率的函数关系。 估计的噪音(以 dB 为单位,相对于 1W)显示在一个框中。
提示
选择 Fixed Axis(固定轴)使曲线更易于读取。
如果要在 CW 和 LFM 之间切换脉冲类型,请使用 Normal Operation(正常操作)对话框。 在选择 LFM 传输之前,请确保您的EK80系统配备了兼容的换能器!
(屏幕截图是在使用假负载时截取的。)
CW 传输
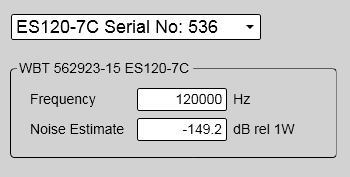
当您使用 CW 传输时,噪音将显示在文本框中。
(屏幕截图是在使用假负载时截取的。)
关于噪音
影响信噪比的噪音可分为以下类型:
| • | 自噪音 |
| • | 环境噪音 |
| • | 电气噪音 |
| • | 回响 |
| • | 水下噪音 |
| • | 渔具噪音 |
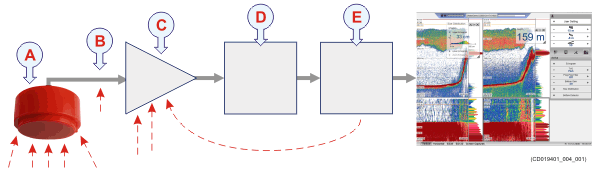
| A | 换能器可以从以下位置拾取噪音:
|
| B | 换能器电缆很长。 发电机、泵、冷却系统和其他电子或机电设备发出的电噪音很容易被拾取。 |
| C | 前置放大器非常灵敏。 它们可以轻松地从内部和外部电源中拾取电气噪音。 前置放大器也容易受到自身电子电路产生的模拟噪音的影响。 转换器和处理电路产生的数字噪音也会带来噪音问题。 |
| D | 转换器将模拟回波转换为数字格式。 |
| E | 信号处理电路会产生数字噪音。 |
详情
选择通道
使用数字设定框选择要研究的通道。 在本文中,通道一词用作通用术语,用于识别收发器、换能器和工作频率的组合。
噪音估算
对于每个传输(“发射脉冲”),EK80会测量所选范围内的回波级别。 通常,这些测量每 5 米进行一次,即使是长距离测量也是如此。
系统会记录水中的所有回波和噪音。 这包括船只本身产生的噪音(电噪音、螺旋桨噪音、机械噪音等),以及水流、气蚀和干扰产生的噪音。 系统会探测到来自鱼类和其他物种以及来自底部的回波,并将其添加到等式中。
通过比较这些测量值,EK80将计算噪音估计值。
提示
如果将EK80设置为 Passive(被动)模式,则会从等式中删除来自传输脉冲的所有回波。这让您可以更好地了解实际噪音。
此信息也显示在 Extras(附加信息)“菜单”上。
等效环境噪音
EK80所估测的噪音包括所有噪音。 这包括船只本身产生的噪音,例如电噪音、螺旋桨噪音、机械噪音和机械振动噪音。 通过附加等式,可以为带宽补偿噪音值。 等效环境噪音值试图表现总噪音,就好像噪音全部来自环境中一样。
此信息也显示在 Extras(附加信息)“菜单”上。
返回至…
相关任务