传感器安装页面
要让 EK80 使用并提供正确的导航信息,必须连接一个或多个外部感应器。 典型的感应器是提供导航信息(航向、速度或地理位置)的感应器。 使用“Sensor Installation (传感器安装)”页面以定义 EK80 将从哪些外部传感器导入信息。 您还必须指定要使用哪些数据图格式。 对于每个相关的传感器,您必须插入可以定义其相对于船舶坐标系的物理位置的偏移值。
先决条件
在将 EK80 设置为 Replay(回放)模式时,Installation(安装)对话框不可用。
如何打开
此页面位于“Installation (安装)”对话框中。 要打开该页面,请在 Setup(设置)菜单中选择 Installation(安装)。

描述
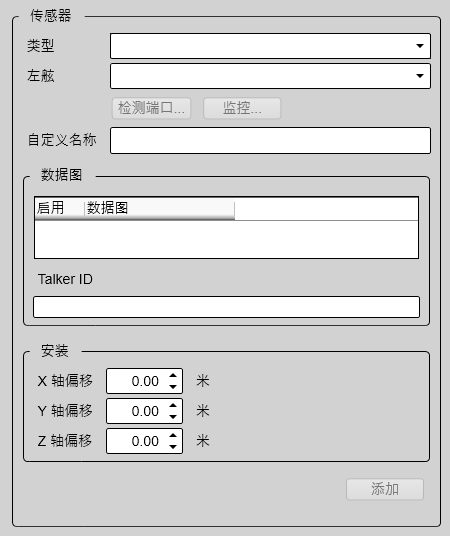
“Sensor Installation (传感器安装)”页面允许 EK80 与外部和传感器和系统进行通信。 参数分组组织。
| • | 已安装的传感器 Installed Sensors(已安装的传感器)列表包含 EK80 上当前安装的所有传感器。 在列表中选择一个传感器以编辑其接口属性,或将其删除。 在列表中选择 New(新建),以将新的传感器接口添加到 EK80。
|
| • | Sensor(传感器) 在“Sensor (传感器)”组中,您可以选择想要从哪种类型的传感器接收信息。 您必须指定要使用哪一个通信端口(LAN(局域网)或串行端口)。 您可以键入自定义名称来标识传感器导入。 选择“Inspect Port (检查端口)”以验证是否已正确地设置所选端口的通信参数。
|
| • | 数据报 在有效数据图格式的列表中,选择需要 EK80 支持的格式。 如有必要,您也可以指定特定的“Talker ID (通话器 ID)”。
|
| • | Installation(安装) 大多数传感器都实际安装在船只上的某个位置。 为了获得准确的测量结果,EK80必须知道传感器的位置(以船只坐标系为参照)。
|
注
如果只是进行更改并在页面底部选择“OK (确定)”,这样并不会安装任何内容。 请选择要安装的内容,定义相关的参数,然后选择“Add (添加)”。
BITE(内置测试设备)对话框中提供了连接到EK80的所有传感器的摘要。
详情
已安装的传感器
Installed Sensors(已安装的传感器)列表包含 EK80 上当前安装的所有传感器。 在列表中选择一个传感器以编辑其接口属性,或将其删除。 在列表中选择 New(新建),以将新的传感器接口添加到 EK80。
Type(类型)
EK80 可以与多种不同类型的传感器进行通信。 使用此列表以选择您想要从其接收信息的传感器类型。
提示
“BITE (内置测试设备)”对话框中的“Sensors (传感器)”页面提供了对所有在用通信线路和传感器的概述。 页面提供了所有相关状态信息。 您将从“Setup (设置)”菜单打开“BITE”对话框。
Port(端口)
要从所选传感器中导入数据,您需要定义输入端口。 这可能是您的处理器单元上的任何可用局域网 (LAN) 或串行线路。
我们建议您在使用端口之前设置相关的通信参数。 若要设置通信参数,请使用“I/O Setup (I/O 设置)”页面。 I/O Setup(I/O 设置)页面位于 Installation(安装)和 Output(输出)对话框中。
检测端口
选择 Inspect Port(检测端口)以检查端口的通信参数。 相关的端口安装对话框将打开。
为 NMEA 0183 定义的通信参数为:
| • | Baud rate(波特率): 4800 bit/s |
| • | Data bits(数据位): 8 |
| • | Parity(奇偶校验位): 偶数 |
| • | Stop bits(停止位): 1 |
有些仪器可能提供其他参数和/或选项。 您必须始终查看制造商提供的相关技术文档。
注
您不能进行任何更改。 若要更改通信参数,请使用“I/O Setup (I/O 设置)”页面。 I/O Setup(I/O 设置)页面位于 Installation(安装)和 Output(输出)对话框中。
Monitor(监视)
只有当您决定编辑先前安装的传感器的参数时,此选项才可用。 选择 Monitor(监视)以打开 Port Monitor(端口监视)对话框。 Port Monitor(端口监视)对话框允许您研究所选串行线路或 LAN 端口上的通信流。
自定义名称
为便于识别传感器接口,您可以输入自定义名称。 此名称显示在EK80用户界面的其他对话框中。 如果您没有将计算机键盘连接到 EK80 系统,请选择 Keyboard(键盘)按钮以打开屏幕键盘。
数据报
该列表显示了所选传感器类型的可用数据报格式。 选择要导入的数据报。
| • | 选择传感器类型 ITI-FS 时,只能选择一个数据报,即 ITI-FS 数据报。 这是一组数据报,允许EK80从拖网系统导入信息。 |
| • | 选择传感器类型 PI50 时,只能选择一个数据报,即 PI50 数据报。 这是一组数据报,允许EK80从捕捞监控系统导入信息。 |
Talker ID
如果要在数据报格式中指定专用的 Talker ID(讲话者标识符),可以在此处定义。
每个 NMEA 数据报均以美元符号开头。后面是一个包含两个字符的“讲话者标识符”标记。此标识符后面有三个字符,用于定义消息类型。Talker ID(讲话者标识符)标识发送数据报的系统。 您可以将此框留空。 这意味着在数据报中插入两个空白字符。 您还可以指定用于将 EK80 标识为“发件人”的两个字符。 在大多数情况下,如果您的接收系统需要将 Talker ID(讲话者标识符)用于特定用途,则只需要定义 Talker ID(讲话者标识符)。
示例
$ESDBT,x.x,f,y.y,M,z.z,F*hh<CR><LF>
在此 NMEA 深度数据报中,Talker ID(讲话者标识符)为“ES”,这表示“回声测深仪”。
提示
如果您没有将计算机键盘连接到 EK80 系统,请选择 Keyboard(键盘)按钮以打开屏幕键盘。
Offsets(偏移)
必须参照船舶的坐标系来定义每一个传感器的物理位置。
为了最大程度地发挥性能,必须将某些传感器的位置定义为相对于坐标系中“船舶原点”的偏移。 为了使 EK80 系统能够向您提供尽可能准确的信息,需要使用所有这些偏移值。 EK80 提供的准确度与您在 Installation Parameters(安装参数)页面上输入的信息的准确性直接相关。
| • | X 轴偏移: 选择 X 轴(艏艉方向)上相对于船舶原点的偏移距离值。 如果传感器位于船舶原点前方,请使用正值为 X 轴进行调整。 |
| • | Y 轴偏移: 选择 Y 轴(横向)上相对于船舶原点的偏移距离值。 如果传感器位于船舶原点右舷侧,请使用正值为 Y 轴进行调整。 |
| • | Z 轴偏移: 选择 Z 轴(垂直方向)上相对于船舶原点的偏移距离值。 如果传感器位于船舶原点下方,请使用正值为 Z 轴进行调整。 |
旋转
对于某些传感器(通常是运动传感器和换能器),传感器的物理位置不足以提取准确的数据。 这些传感器采用物理角度安装。 这些角度通常被称为“安装角度”或“偏移角度”。 传感器可以绕船只坐标系的三个轴旋转。
| • | X 轴旋转 (横向斜角) |
| • | Y 轴旋转 (Pitch(纵向角度)) |
| • | Z 轴旋转 (偏航) |
在EK80用户界面中,只需在显示参数时指定安装角度。
| • | X 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 X 轴之间(在船首和船尾方向)的任何偏差。 |
| • | Y 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 Y 轴之间(在横向方向)的任何偏差。 |
| • | Z 轴旋转 : 指定一个角度(以度为单位)以补偿坐标系中与 Z 轴之间(在垂直方向)的任何偏差。 |
添加
设置新传感器接口的参数后,选择 Add(添加)以便保存。 将传感器添加到EK80配置后,它将出现在 Installed Sensors(已安装的传感器)列表中。
Remove(删除)
Installed Sensors(已安装的传感器)列表包含 EK80 上当前安装的所有传感器。 如果要删除传感器,请在列表中选择它,然后在 Sensor Installation(传感器安装)页面底部选择 Remove(删除)。
注
您不能撤消此操作。
Edit(编辑)
Installed Sensors(已安装的传感器)列表包含 EK80 上当前安装的所有传感器。 如果要编辑先前安装的传感器的参数,请在列表中选择它,然后在 Sensor Installation(传感器安装)页面底部选择 Edit(编辑)。
返回至…
相关任务
概念描述