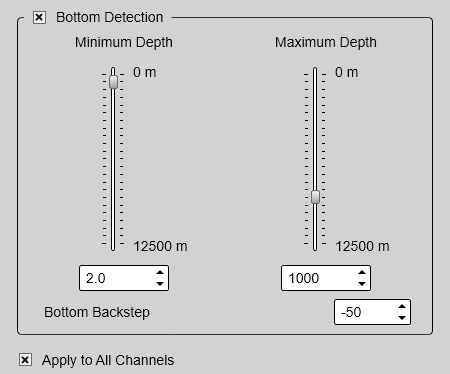
Bottom Detection dialog box
Locating the bottom (seafloor) is important for the EK80 system. The purpose of the Bottom Detection settings is to define the upper and lower depth limits most likely to be used during normal operation. You can also modify the setting for Bottom Backstep to change the bottom detection relative to the bottom echo.

How to open
These parameters are accessed from two places in the user interface.
| • | The dialog box is opened from the Active menu |
| • | The page is opened in the Information Pane Options dialog box. To open the Information Pane Options dialog box, select the button on the Active menu. You can also select the Setup button in the relevant information pane. |
The parameters are the same. It does not matter if you open the page or the dialog box.
Description
Occasionally, difficult environmental, water or bottom conditions may inhibit a bottom lock. The EK80 system needs this bottom lock to locate the correct depth, and to stay on it during the operation, even if the depth changes continuously. The Bottom Detection parameters are provided to rectify this.
The Bottom Detection parameters provide separate limits for minimum and maximum depth. These limits may be used to obtain a bottom lock on the depth when the EK80 system is transmitting.
The Bottom Backstep parameter allows you to manually modify where on the bottom echo the depth will be detected.
Tip
If you have problems with bottom detection, you may consider disabling it. This can be useful if you only wish to study targets in the water column.
Details
Bottom Detection
This is an "on/off" switch. Select the box to enable the function.
Maximum Depth
The search for the bottom echo extends down to this depth whenever bottom track is lost.
Use a slightly larger depth value than the deepest spot you expect to visit. This will prevent annoyingly long ping intervals every time the bottom track is lost. A depth value of either 0 (zero) or less than the minimum depth disables the bottom detector.
Note
If you set maximum depth to a value identical or smaller than the minimum value, the bottom detection algorithm will be disabled. The EK80 system will not detect the bottom at all, and the displayed depth will be 0.00 m.
Minimum Depth
The bottom detector starts the search for the bottom echo at this depth. The detector will fail in shallow water if you select a too large depth value, and the tail of the transmitting pulse may
cause problems if a too small value is set.
Note
If you set maximum depth to a value identical or smaller than the minimum value, the bottom detection algorithm will be disabled. The EK80 system will not detect the bottom at all, and the displayed depth will be 0.00 m.
Bottom Backstep
Bottom Backstep allows you to manually modify where on the bottom pulse the depth shall be detected. The setting does not have an effect on the ability to detect and track the bottom.
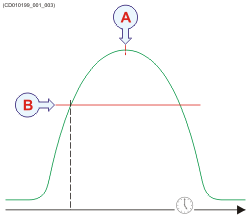
| A | The peak of the bottom pulse |
| B | -50 dB is the default bottom backstep level |
The bottom pulse basically identifies the bottom depth just prior to the peak of the pulse (A). However, this may not be the
true bottom. For example, if the bottom pulse is generated by a rock bottom under a thick layer of mud, the actual depth is
slightly shallower. For this reason, the EK80 system is by default set up to give you a depth reading a few milliseconds before the peak of the pulse. This is done by setting the Bottom Backstep level to a default value of -50 dB (B).
The actual bottom will never appear at the peak of the bottom pulse (A), it will always be slightly before the peak. By changing
the Bottom Backstep value you can detect the bottom earlier.
Apply to All Channels
Check this box to apply the current setting to all the channels on your EK80 system. In this context, the term channel is used as a common term to identify the combination of transceiver, transducer and operating frequency.