Sensor Configuration page
With multiple sensors connected to the EK80 system, many of them will provide the same datagrams. We cannot expect that these datagrams provide the same information. The Sensor Configuration page allows you to define a datagram priority, so that the information from the "most reliable" sensor is used by the EK80 system. You can also define manual values in case a sensor is unserviceable, or not installed.
Prerequisites
Several of the pages in the Installation dialog box are not available when your EK80 system is set to Replay mode.
How to open
This page is located in the Installation dialog box. To open, select it on the Setup menu.

Description
When the EK80 system communicates with peripheral devices (for example navigation sensors), the information is contained in datagrams.
The term "datagram" has been defined as follows:
The majority of the datagrams used by the EK80 system are defined by the National Marine Electronics Association (NMEA). Other proprietary datagrams are defined by third-party organizations or by Kongsberg Maritime.
Any information in a datagram, for example the current depth, may be provided in different datagrams from several sensors. Due to a number of reasons (environmental conditions, installation, configuration, accuracy, etc.), the numerical values provided
can be different from one sensor to another.
Several sensor are provided on the Sensor Configuration page, one for each type of information. Select the sensor you wish to configure in the Sensor list. For each type, you can define a priority sensor by rearranging the datagrams in a list. You can also define manual values in case a sensor is unserviceable, or not installed.
Tip
The EK80 system can communicate with several different sensor types. Use the Sensor Installation page to define which external sensors your EK80 system will import information from. You must also specify which datagram formats to use. The Sensor Installation page is located in the Installation dialog box.
A summary of all the sensors that are connected to the EK80 system is provided in the Diagnostics dialog box.
When you save echo data in RAW format, all sensor data are included.
Note
If you have two sensors providing the same information, but on different communication ports, certain limitations apply. During normal operation, you can easily decide which sensor you wish to use. During replay, you can only play back from one of these sensors. For this reason, only the information from the currently "active" sensor is saved.
When you work in the Installation dialog box, you must always select Apply to save the changes made on a page. You must do this before you continue working on a different page.
Details
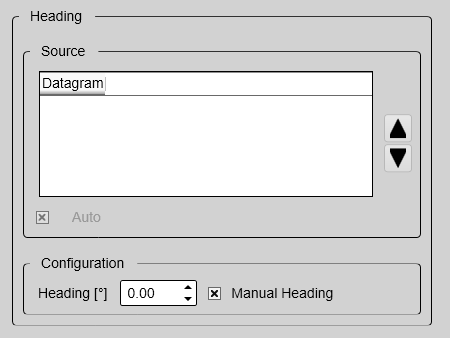
Sensor
Source
Auto
Select Auto to control the functionality.
| • | With Auto enabled, the priority list is used. Information is imported from the sensor at the top of the list. If the sensor fails to provide information for more than 20 seconds, data from the next sensor is used. |
| • | With Auto disabled, the priority list is not used. Information is imported from the sensor at the top of the list. All other sensors are ignored. |
Configuration

On most of the pages you can specify a manual value. Use this function if a sensor is unserviceable or not installed. Click to enable this function, and select or type the requested value.
When you select the Time sensor, you can set the ZDA datagram to synchronize the internal clock in the Processor Unit. Acceptable time deviation is configurable.To do this, you need administrative privileges on your Processor Unit.
When you select the Temperature sensor, you will notice that for some transducers the checkbox is replaced by radio buttons. These enables you to select Manual Temperature, Datagram or Transceiver as source for temperature measurements. This is because some transducers offer temperature measurements. A drop down list of channels supporting these transducer induced temperature measurements will appear when a transceiver is
selected.
Set the VLW datagram for vessel’s distance sailed. The distance is displayed in the top bar. To reset the distance use the reset function.