Sensor Installation page
For the EK80 system to use and offer correct navigational information, one or more external sensors must be connected. Typical sensors are those providing navigational information (heading, speed or geographical position). Use the Sensor Installation page to define which external sensors your EK80 system will import information from. You must also specify which datagram formats to use. For each relevant sensor you must insert the offset values that define the its physical location relative to the vessel’s
coordinate system.
Prerequisites
Several of the pages in the Installation dialog box are not available when your EK80 system is set to Replay mode.
How to open
This page is located in the Installation dialog box. To open, select it on the Setup menu.

Description
The Sensor Installation page allows your EK80 system to communicate with external sensors and systems. The parameters are organized in groups.
Installed Sensors
The Installed Sensors list contains all the sensors that are currently installed on the EK80 system. Select a sensor in the list to edit its interface properties, or to remove it. Select New in the list to add a new sensor interface to the EK80 system.
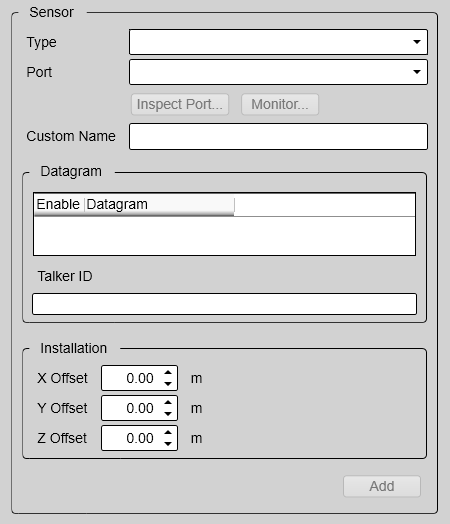
Sensor
In the Sensor group you select which type of sensor you want to receive information from. You must specify which communication port to use (LAN (Local Area Network) or serial port). You can type a custom name to identify the sensor import. Select Inspect Port to verify that the communication parameters of the chosen port have been set up correctly.
Datagram
In the list of valid datagram formats, select the format(s) to be accepted by the EK80 system. If necessary, you can also specify a specific Talker ID.
Installation
Most sensors are physically mounted somewhere on your vessel. For accurate measurements, the sensor locations - referenced to the vessel’s coordinate system - must be known to the EK80 system.
Note
Just making changes and selecting OK at the bottom of the page will not install anything. Select what to install, define the relevant parameters, and then select Add.
A summary of all the sensors that are connected to the EK80 system is provided in the Diagnostics dialog box.
Details
Installed Sensors
Type
The EK80 system can communicate with several different sensor types. Use this list to select the sensor type you want to receive information from.
Tip
The Sensors page in the Diagnostics dialog box provides an overview of all the communication lines and sensors in use. All relevant status information is provided. Open the Diagnostics dialog box from the Setup menu.
Port
To import the data from the chosen sensor you need to define an input port. This can be any available Local Area Network (LAN) or serial line on your Processor Unit.
We recommend that you set up the relevant communication parameters before you use the port. To set up the communication parameters, use the I/O Setup page. The I/O Setup page is located in the Installation and Output dialog boxes.
Inspect Port
Select Inspect Port to check the communication parameters for the port. The relevant port setup dialog box opens.
The communication parameters defined for NMEA 0183 are:
| • | Baud rate: 4800 bit/s |
| • | Data bits: 8 |
| • | Parity: Even |
| • | Stop bits: 1 |
Some instruments may provide other parameters and/or options. You must always check the relevant technical documentation supplied by the manufacturer.
Monitor
Custom Name
Offsets
The physical location of each sensor must be defined with reference to the vessel’s coordinate system.
The position of certain sensors must be defined as an offset to the Ship Origin in the coordinate system to maximize performance. These offset values are all required to allow the EK80 system to give you as accurate information as possible. The degree of accuracy offered by the EK80 system is directly related to the accuracy of the information you enter on the Installation Parameters pages.
X Offset
Y Offset
Rotation
For some sensors - typically motion sensors and transducers – the physical location of the sensor is not sufficient to extract
accurate data. These sensors are installed with physical angles. These angles are often referred to as "installation angles" or "offset angles". The sensor can be rotated around the three axis of the vessel coordinate system.
| • | Rotation Around X (Roll) |
| • | Rotation Around Y (Pitch) |
| • | Rotation Around Z (Yaw) |
In the user interface you will only need to specify the installation angles when the parameters are shown.
Rotation Around X
Rotation Around Y
Add